


Publications
Peer-reviewed journal article - Peer-reviewed book chapters - Peer-reviewed conference articles - Thesis/HDR - Vulgarization articles
Author's profile also available at: Dlpb, Orcid, Scopus, IDref, Viaf, Google scholar
Peer-reviewed journal articles
2026
Assessing the 6-DoF Accuracy and Robustness of the HTC VIVE Ultimate\textregistered Stand-Alone Inside-Out Motion Tracker: A Robot-Driven Evaluation
Abstract | ||
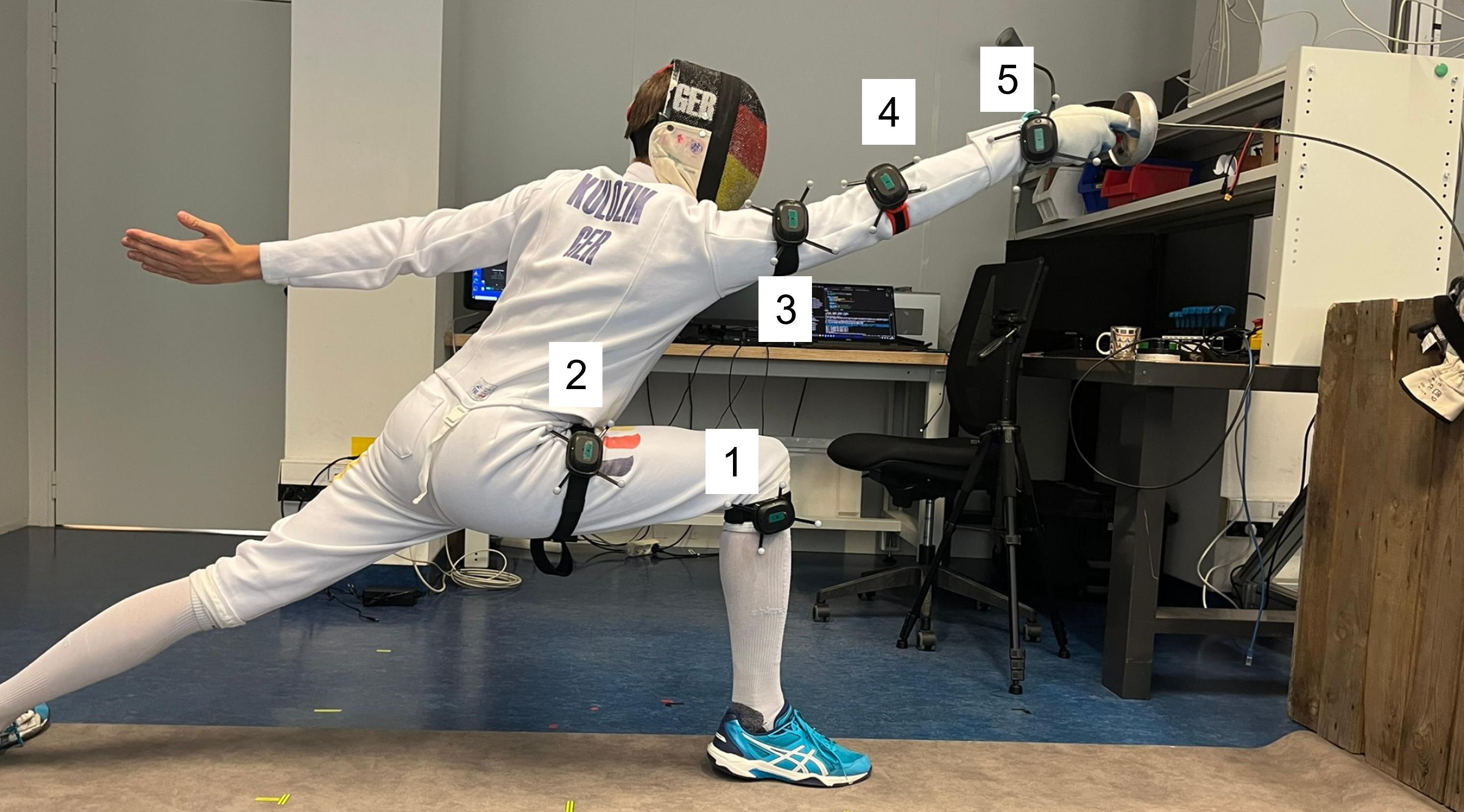 | The HTC VIVE Ultimate Tracker®, using inside-out tracking with internal stereo cameras for 6 DoF tracking without external cameras, offers a cost-efficient and simple setup for motion tracking. Originally for the gaming and VR industry, we explored its application beyond VR, providing C++ and Python source code for data capturing without a VR headset. This is the first study to evaluate the tracker’s accuracy in various experimental scenarios, including robotic and natural human movements. To assess the robustness of the displacement tracking accuracy, we used a robotic arm for precise, repeatable motion. Using an optical motion capture system as a reference, we conducted tests under varying conditions: lighting, movement velocity, environmental changes from displacing objects and human movement in front of the trackers, and varying the range of motion. On average, the HTC VIVE Ultimate Tracker showed an accuracy of 4.98 mm ± 4 mm. In stark contrast, orientation accuracy was highly robust and consistent across all conditions, with a mean RMSE of 0.36° ±0.31°, and remained unaffected by the perturbations that degraded positional tracking. Key factors influencing accuracy were lighting and range of motion. Under optimal conditions—good lighting and a reduced range of motion—the accuracy and precision improved, resulting in a mean error of 2.59 mm with a standard deviation of ± 0.81 mm. We also used five trackers to record human whole-body movements in ecologically valid scenarios, demonstrating an approximate positional accuracy of 1 cm, validated through two distinct pick-and-place tasks. While less accurate and precise than traditional fixed-camera-based motion capture systems, the HTC VIVE Ultimate Tracker® is a compelling alternative for research due to its low cost, ease of use, and capacity to track human and object motion beyond the constraints of conventional VR or motion capture environments. |
2025
Review of upper-limb occupational exoskeletons: From technology to assessment
Abstract | ||
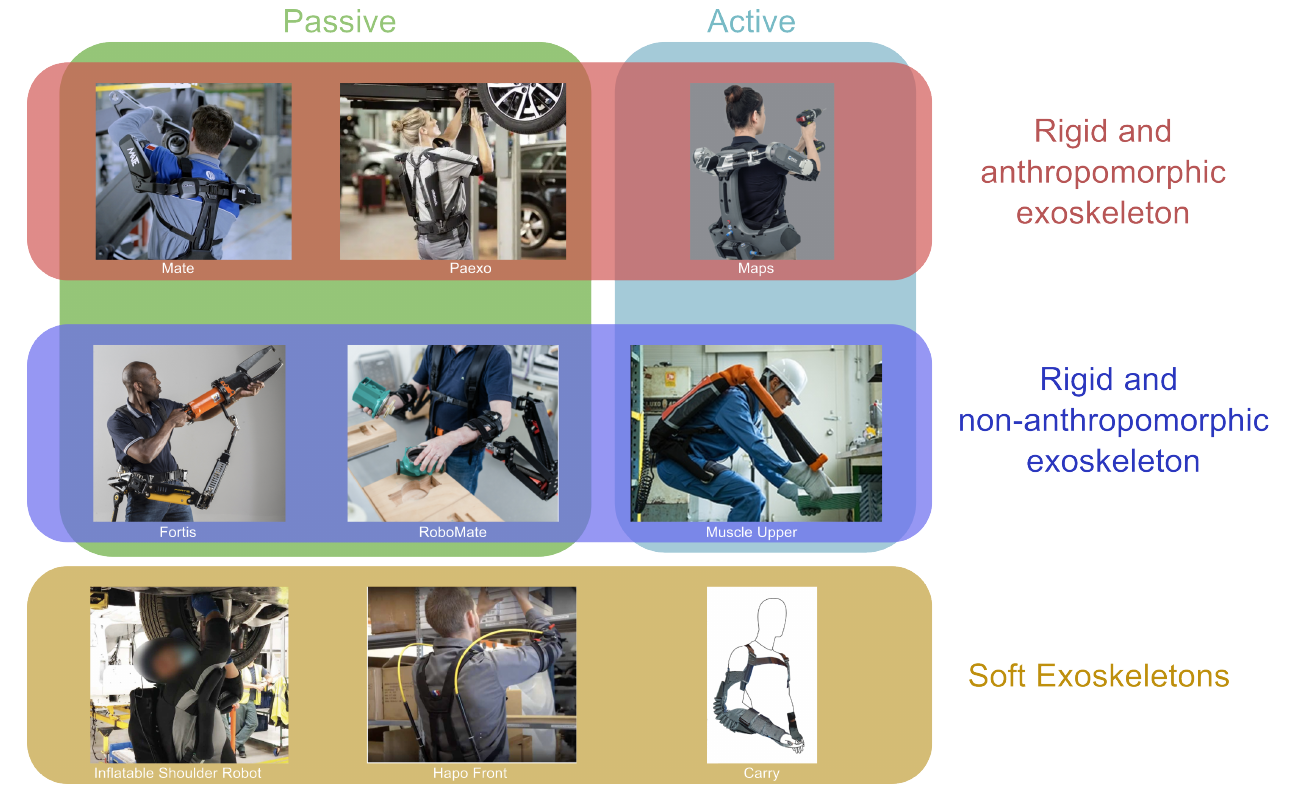 | Occupational exoskeletons are emerging as a promising solution to reduce work-related musculoskeletal disorders (MSDs) across various industries. Upper-limb exoskeletons are particularly relevant, given the high prevalence of MSDs associated with repetitive arm motions and overhead tasks. However, evaluating the effectiveness of these devices requires careful analysis of the specific technologies and kinematic designs they incorporate to ensure their safe and effective integration. This paper presents a detailed technological review and analysis of the existing literature, focusing on the diversity of technologies and the need for more comprehensive studies addressing challenges in both laboratory and real-world settings. This study particularly highlights the necessity of assessments that account for the unique characteristics of different exoskeleton technologies, rather than generalizing across them. It also emphasize the need to examine not only reductions in muscle activity but also the potential for overlooked side effects, long-term impacts, and adaptations across different task types. These factors are crucial, as upper-limb exoskeletons are planned to be deployed for prolonged use in complex industrial environments. |
Cybernétique, information, rétroaction: Une grille de lecture pour penser la prothèse de membre comme interface
Abstract | ||
 | (Re)penser les prothèses avec Norbert Wiener ? Parce qu’elle implique le passage de données informationnelles d’une structure à l’autre, et une communication bilatérale entre les deux entités qu’elle connecte, la notion d’interface peut faire écho au domaine de la cybernétique. Cette approche théorique développée par Norbert Wiener en 1948 (Wiener, 2014 [1948]) met en effet l’accent sur l’étude des échanges de flux d’informations au sein d’un système naturel ou artificiel, ainsi que sur les mécanismes de régulation associés. L’appareillage prothétique d’un membre amputé, parce qu’il consiste en une collaboration fonctionnelle entre un système vivant (le corps) et un système mécanique (la prothèse), est un bon exemple de ce qu’est une interface cybernétique entre système naturel et artificiel. Wiener aborde d’ailleurs explicitement dans ses travaux le cas de l’appareillage du membre amputé (Wiener, 2014 [1950]). La cybernétique apparaît donc comme un paradigme pertinent à employer dans le cadre d’une réflexion sur les interfaces et interactions corps/prothèses. Après avoir suscité un vif intérêt de la part de la communauté scientifique jusque dans les années 60, ce paradigme finit par perdre de son influence jusqu’à être à ce jour pratiquement oublié (Breton, 1997). Pourtant, il nous apparaît que la cybernétique reste encore un excellent outil générique de compréhension des phénomènes complexes, de quelque nature qu’ils soient et fait toujours sens dans notre monde contemporain. |
Comparison of Solo and Collaborative Trimanual Operation of a Supernumerary Limb in Tasks With Varying Physical Coupling
Abstract | ||
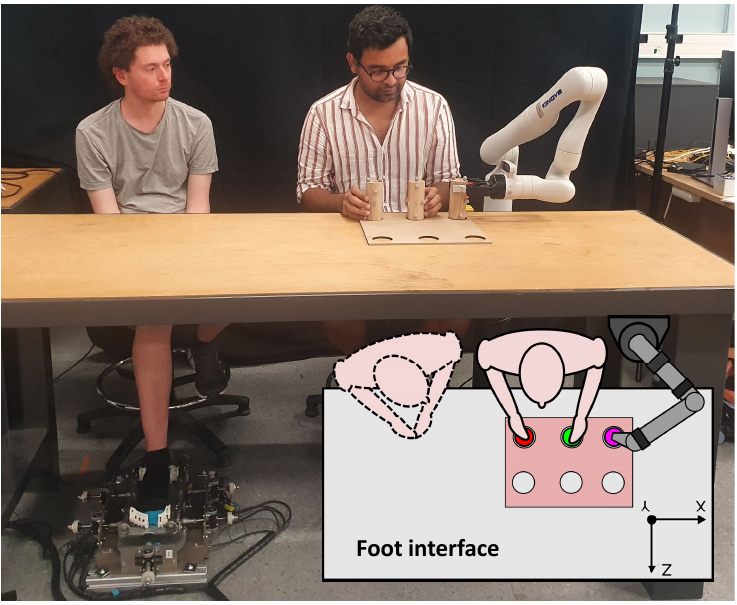 | Through the use of robotic supernumerary limbs, it has been proposed that a single user could perform tasks like surgery or industrial assembly that currently require a team. Although validation studies, often conducted in virtual reality, have demonstrated that individuals can learn to command supernumerary limbs, comparisons typically suggest that a team initially outperforms a supernumerary limb operating individual. In this study, we examined (i) the impact of using a commercially available physical robot setup instead of a virtual reality system and (ii) the effect of differences between limb couplings on user performance during a series of trimanual operations. Contrary to previous findings, our results indicate no clear difference in user performance when working as a trimanual user, in the pick and place of three objects, compared to when working as a team. Additionally, for this task we observe that while users prefer working with a partner when they control the majority of the limbs, we find no clear difference in their preference between solo trimanual operation and when they work with a partner and control the third limb. These findings indicate that factors typically not present in virtual reality such as visual occlusion and haptic feedback may be vital to consider for the effective operation of supernumerary limbs, and provide initial evidence to support the viability of supernumerary limbs for a range of physical tasks. |
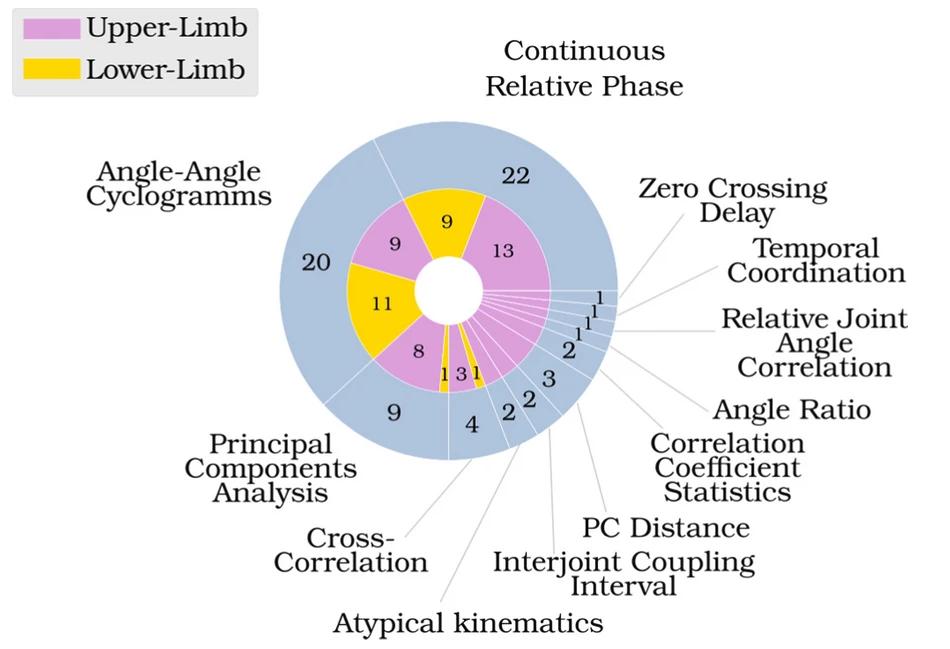
JcvPCA and JsvCRP: a set of metrics to evaluate changes in joint coordination strategies
Abstract | ||
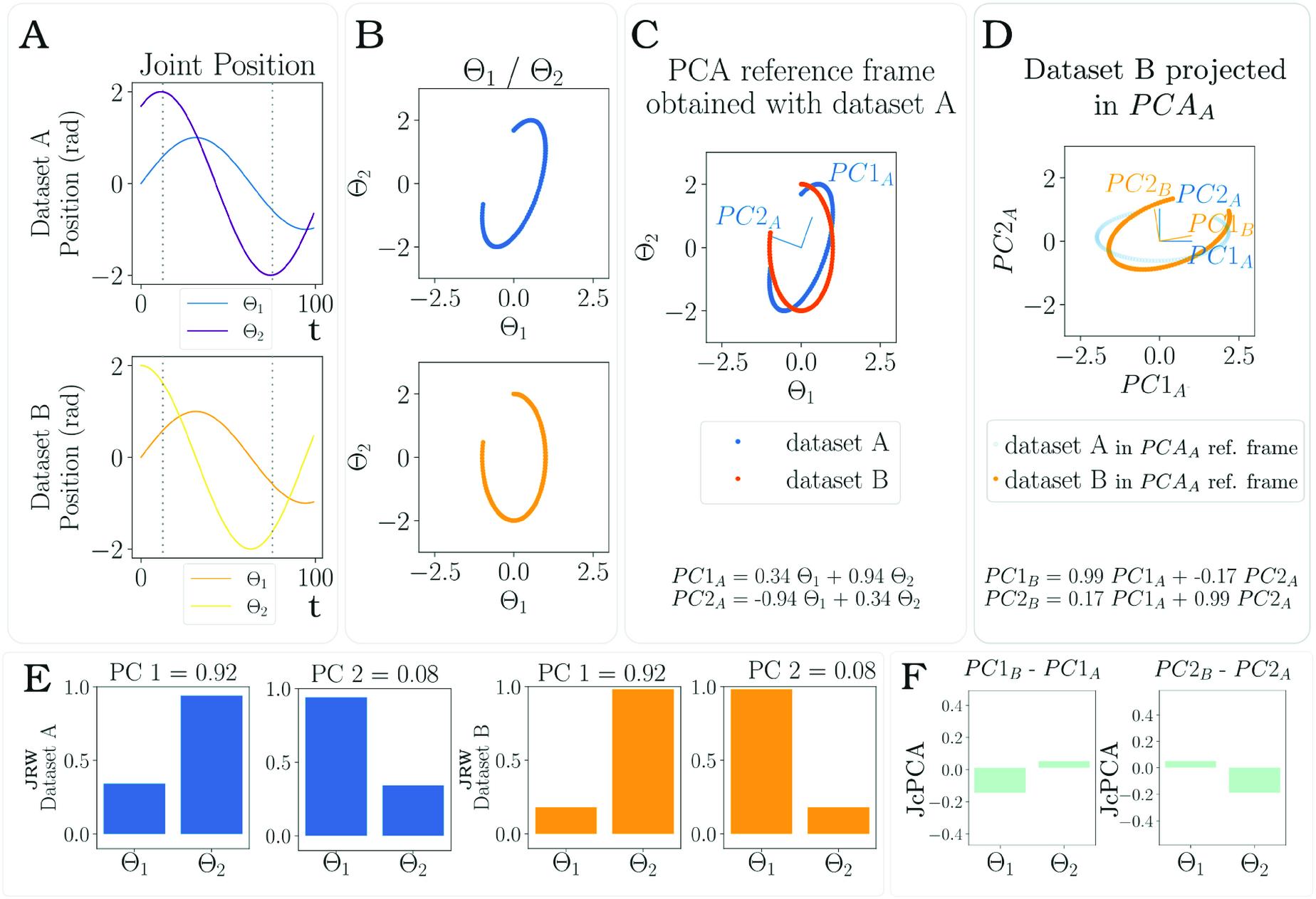 | Characterizing changes in inter-joint coordination presents significant challenges, as it necessitates the examination of relationships between multiple degrees of freedom during movements and their temporal evolution. Existing metrics are inadequate in providing physiologically coherent results that document both the temporal and spatial aspects of inter-joint coordination. In this article, we introduce two novel metrics to enhance the analysis of inter-joint coordination. The first metric, Joint Contribution Variation based on Principal Component Analysis (JcvPCA), evaluates the variation in each joint’s contribution during series of movements. The second metric, Joint Synchronization Variation based on Continuous Relative Phase (JsvCRP), measures the variation in temporal synchronization among joints between two movement datasets. We begin by presenting each metric and explaining their derivation. We then demonstrate the application of these metrics using simulated and experimental datasets involving identical movement tasks performed with distinct coordination strategies. The results show that these metrics can successfully differentiate between unique coordination strategies, providing meaningful insights into joint collaboration during movement. These metrics hold significant potential for fields such as ergonomics and clinical rehabilitation, where a precise understanding of the evolution of inter-joint coordination strategies is crucial. Potential applications include evaluating the effects of upper limb exoskeletons in industrial settings or monitoring the progress of patients undergoing neurological rehabilitation. |
Design and Experimental Validation of a Controller for Bowden-Cable Actuators Subject to Friction Variation
Abstract | ||
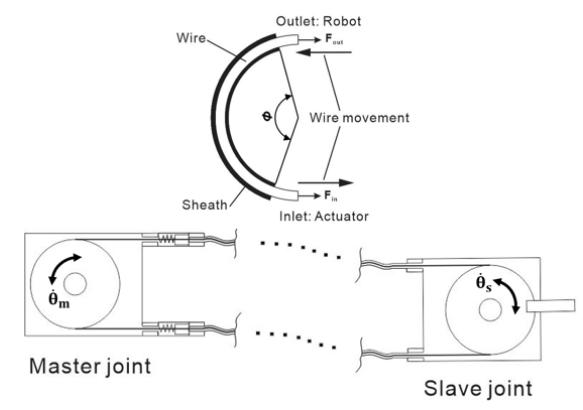 | Exoskeleton robots hold great potential for both industrial applications and assisting patients with locomotor disabilities. Among them, flexible exoskeletons, known as “exosuits”, have attracted a great deal of interest from researchers. Those are usually made up of flexible components such as cables and pieces of fabric, which are much lighter than the rigid exoskeletons. By using a Bowden-cable transmission in their design, the actuators can be placed away from the end-effectors of exosuits and thus are considered an effective transmission solution for reducing the weight and inertia felt by operators wearing the exosuit. However, a critical issue of Bowden-cable transmission is the complex and nonlinear friction between the inner cable and outer sheath, which affects the control robustness by introducing a time delay and inaccuracy in position tracking. Besides, friction along the cable varies with the accumulated bending angle of the sheath. A control synthesis approach is proposed for the Bowden-cable actuation system, utilizing twisting and super-twisting algorithms to ensure finite time stability and robustness properties of a perturbed double- integrator model. The experimental results demonstrate the effectiveness of the proposed method across various bending angle conditions. |
2024
Smart ArM: a customizable and versatile robotic arm prosthesis platform for Cybathlon and research
Abstract | ||
 | In the last decade, notable progress in mechatronics paved the way for a new generation of arm prostheses, expanding motor capabilities thanks to their multiple active joints. Yet, the design of control schemes for these advanced devices still poses a challenge, especially with the limited availability of command signals for higher levels of arm impairment. When addressing this challenge, current commercial devices lack versatility and customizing options to be employed as test-beds for developing novel control schemes. As a consequence, researchers resort to using lab-specific experimental apparatuses on which to deploy their innovations, such as virtual reality setups or mock prosthetic devices worn by unimpaired participants. To meet this need for a test-bed, we developed the Smart Arm platform, a human-like, multi-articulated robotic arm that can be worn as a trans-humeral arm prosthesis. The design process followed three principles: provide a reprogrammable embedded system allowing in-depth customization of control schemes, favor easy-to-buy parts rather than custom-made components, and guarantee compatibility with industrial standards in prosthetics. The Smart ArM platform includes motorized elbow and wrist joints while being compatible with commercial prosthetic hands. Its software and electronic architecture can be easily adapted to build devices with a wide variety of sensors and actuators. This platform was employed in several experiments studying arm prosthesis control and sensory feedback. We also report our participation in Cybathlon, where our pilot with forearm agenesia successfully drives the Smart Arm prosthesis to perform activities of daily living requiring both strength and dexterity. These application scenarios illustrate the versatility and adaptability of the proposed platform, for research purposes as well as outside the lab. The Smart Arm platform offers a test-bed for experimenting with prosthetic control laws and command signals, suitable for running tests in lifelike settings where impaired participants wear it as a prosthetic device. In this way, we aim at bridging a critical gap in the field of upper limb prosthetics: the need for realistic, ecological test conditions to assess the actual benefit of a technological innovation for the end-users. |
New insights into muscle activity associated with phantom hand movements in transhumeral amputees
Abstract | ||
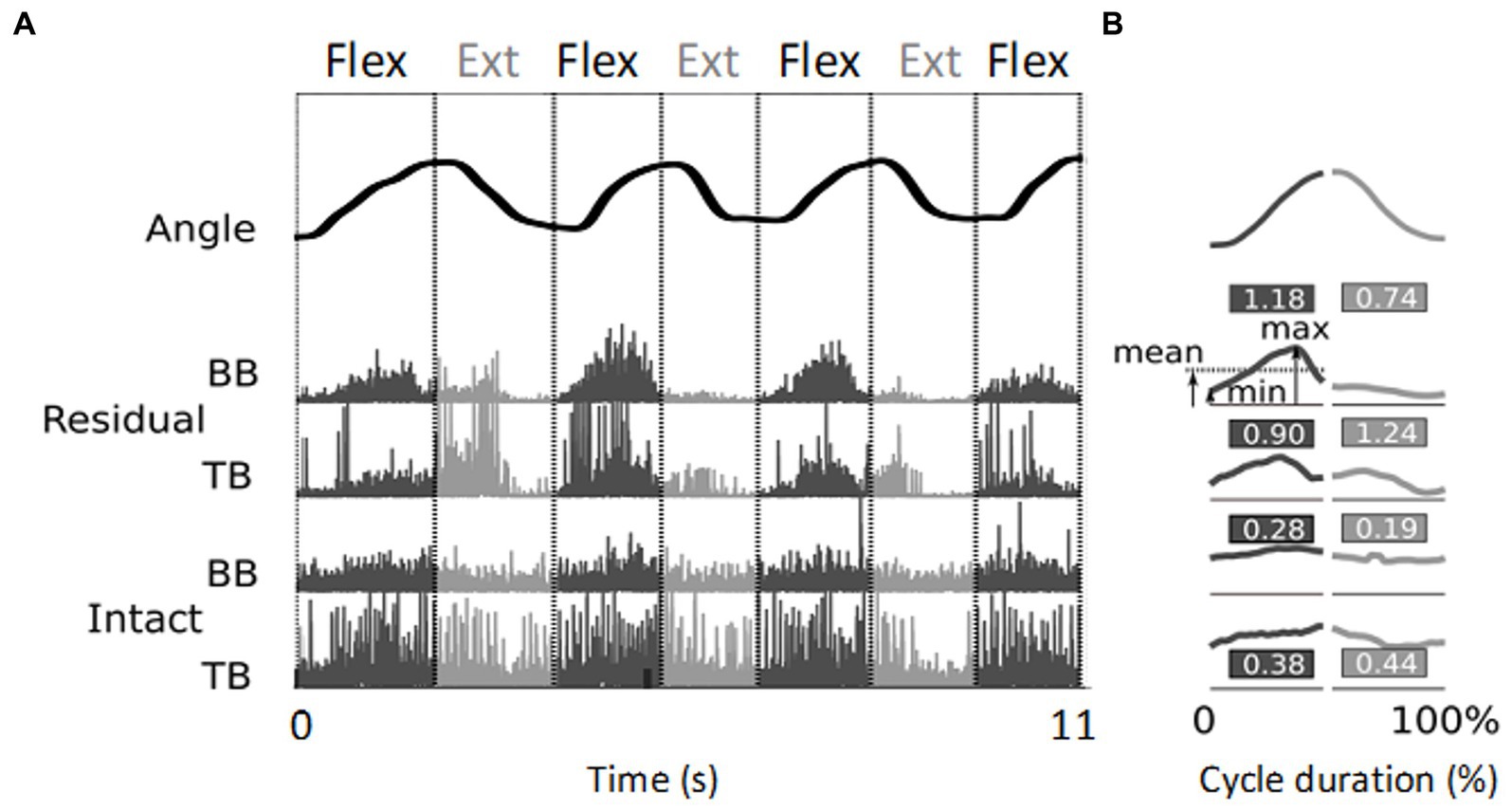 | Muscle activity patterns in the residual arm are systematically present during phantom hand movements (PHM) in transhumeral amputees (Raffin et al., 2012). However, their characteristics have not been directly investigated yet, leaving their neurophysiological origin poorly understood. This study pioneers a neurophysiological perspective in examining PHM-related muscle activity patterns by characterizing and comparing them with those in the arm, forearm, and hand muscles of control participants executing intact hand movements (IHM) of similar types. To enable rigorous comparison, we developed meta-variables independent of electrode placement, quantifying the phasic profile of recorded surface EMG signals and the specificity of their patterns across electrode sites and movement types. Similar to the forearm and hand muscles during IHM, each signal recorded from the residual upper arm during PHM displays a phasic profile, synchronized with the onset and offset of each movement repetition. Furthermore, the PHM-related patterns of phasic muscle activity are specific not only to the type of movement but also to the electrode site, even within the same upper arm muscle, while these muscles exhibit homogeneous activities in intact arms. Our results suggest the existence of peripheral reorganization, eventually leading to the emergence of independently controlled muscular sub-volumes. This reorganization potentially occurs through the sprouting of severed axons and the recapture of muscle fibres in the residual limb (Woo et al., 2016). Further research is imperative to comprehend this mechanism and its relationship with PHM, holding significant implications for the rehabilitation process and myoelectric prosthesis control. |
Innovative Multi Vibrotactile-Skin Stretch (MuViSS) Haptic Device for Sensory Motor Feedback from a Robotic Prosthetic Hand
Abstract | ||
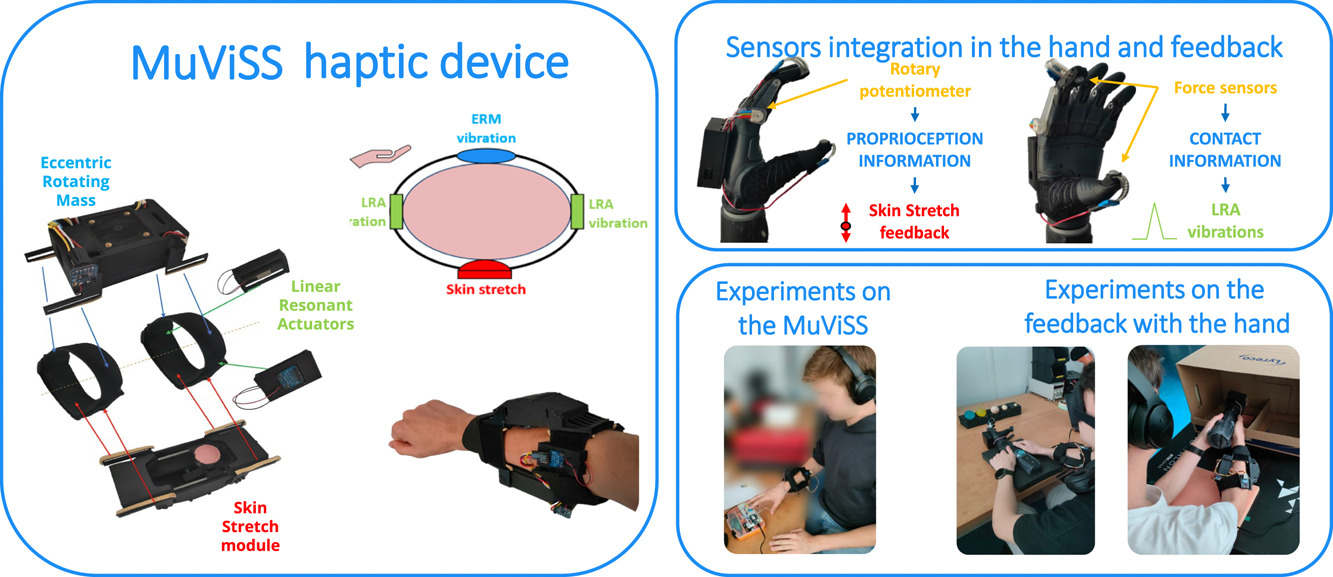 | In the field of upper limb prosthetics, the incorporation of sensory feedback is critical to cognitive processes and behavior. Studies have demonstrated that haptic feedback improves amputees’ control over their prostheses. This study presents the development of the MuViSS (Multi Vibrotactile-Skin Stretch) haptic device, which is worn on the wrist and forearm and provides sensory-motor feedback from a robotic prosthetic hand. An innovative feedback strategy is presented that has not been explored in the existing literature. By combining two already established strategies – namely, stretching the skin in conjunction with proprioception and incorporating cues on contact – the research offers an unexplored approach to sensory feedback. Adaptations were made to a commercially available Taska prosthetic hand to integrate sensors and capture data for haptic feedback. Two classes of tests performed on non-amputee subjects have shown promising efficacy and performance. A first class of tests, designed to assess the effectiveness of MuViSS feedback, was conducted with five participants, testing each feedback separately. In order to evaluate the effectiveness of the entire system, tests were also performed on nine subjects with MuViSS and the prosthetic hand being controlled. They allowed the comparison of the MuViSS feedback with the classical force feedback by vibration and with the condition without haptic feedback. The results showed that the new feedback solution was able to provide size and stiffness information in the absence of vision. In addition, the feedback improved the performance of a motor task, specifically grasping a marble, with vision. The study demonstrates that the system has the potential to improve control, enhance performance, and positively impact the user’s overall experience when operating prosthetic devices. |
2023
Le mythe du cyborg : techno-enchantement, récits héroïques et promesses de réparation technologique du corps
Abstract | ||
 | The cyborg and its technologically reconstructed body, far from being just a character from the contemporary imagination and the mass culture of science fiction, can be considered now as contemporary myth. Beyond the simple heroic figure it embodies, it also echoes a contemporary paradigm, that of the possible repair, or even enhancement of the biological body through technological substitution. But this new representation of the body has significant consequences on the technological, medical and social fields : it reorients and influences the way bodies fitted with prostheses are perceived and treated, but also conveys ideals loaded with ideological assumptions and political interests. This article proposes, by bringing to light the modalities of constitution and functioning of the cyborg myth, to deconstruct and demystify the ideological values that it now represents. |
A guide to inter-joint coordination characterization for discrete movements: a comparative study
Abstract | ||
 | Characterizing human movement is essential for understanding movement disorders, evaluating progress in rehabilitation, or even analyzing how a person adapts to the use of assistive devices. Thanks to the improvement of motion capture technology, recording human movement has become increasingly accessible and easier to conduct. Over the last few years, multiple methods have been proposed for characterizing inter-joint coordination. Despite this, there is no real consensus regarding how these different inter-joint coordination metrics should be applied when analyzing the coordination of discrete movement from kinematic data. In this work, we consider 12 coordination metrics identified from the literature and apply them to a simulated dataset based on reaching movements using two degrees of freedom. Each metric is evaluated according to eight criteria based on current understanding of human motor control physiology, i.e, each metric is graded on how well it fulfills each of these criteria. This comparative analysis highlights that no single inter-joint coordination metric can be considered as ideal. Depending on the movement characteristics that one seeks to understand, one or several metrics among those reviewed here may be pertinent in data analysis. We propose four main factors when choosing a metric (or a group of metrics): the importance of temporal vs. spatial coordination, the need for result explainability, the size of the dataset, and the computational resources. As a result, this study shows that extracting the relevant characteristics of inter-joint coordination is a scientific challenge and requires a methodical choice. As this preliminary study is conducted on a limited dataset, a more comprehensive analysis, introducing more variability, could be complementary to these results. |
Competition increases the effort put into a physical interaction task
Abstract | ||
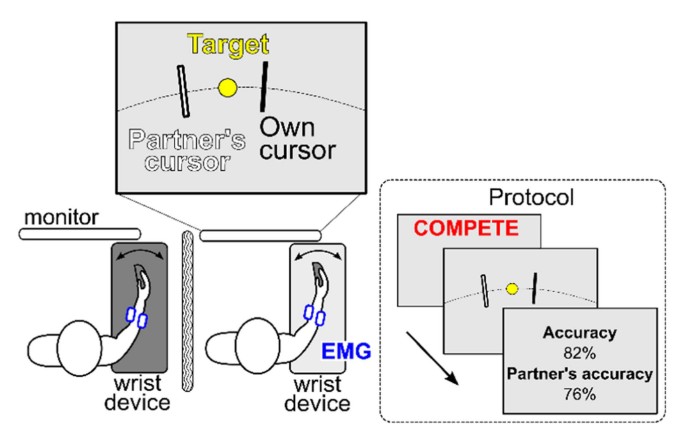 | Physical interaction can enhance motor learning, but it remains unclear what type of interaction is best suited to increasing the active effort put into a task, which should improve learning. Here, we used the same interactive tracking task with different instructions to induce three training conditions: competition, collaboration, and self-improvement, where partners improve their own performance while interacting haptically with each other. The effort was gauged by measuring the total normalized muscle activity. Feedback of task performance and the haptic dynamics were identical in all three training conditions, so the effort needed to complete the task was the same. Only the instructions to ‘compete with the partner’, ‘improve your and your partner's accuracy’ and ‘improve your accuracy’ were different among the competition, collaboration, and self-improvement conditions, respectively. Despite having the same goal of maximizing self-performance during competition and self-improvement, participants exerted significantly more effort during competition, and their tracking accuracy was highest during competitive practice. Least effort was put into collaboration but tracking accuracy during collaboration was comparable to self-improvement. Our results suggest that interactive haptic competition can induce higher active drive or effort than either collaborative training or self-focused practice. |
Effect of Vibrotactile Feedback on the Control of the Interaction Force of a Supernumerary Robotic Arm
Abstract | ||
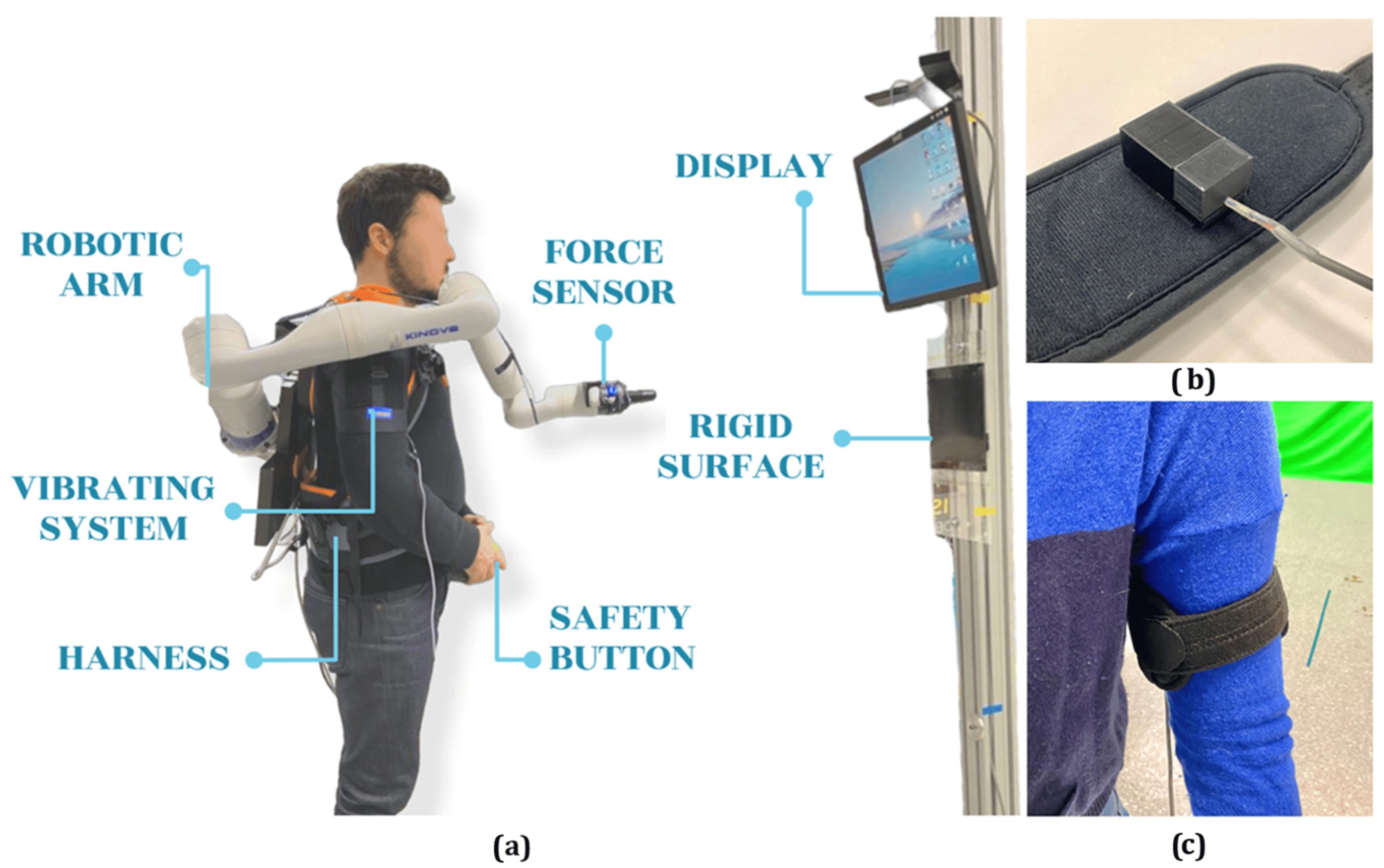 | Supernumerary robotic limbs are mainly designed to augment the physical capabilities of able-bodied individuals, in a wide range of contexts from body support to surgery. When they are worn as wearable devices, they naturally provide inherent feedback due to the mechanical coupling with the human body. The user can, thus, perceive the interaction with the environment by relying on a combination of visual and inherent feedback. However, these can be inefficient in accomplishing complex tasks, particularly in the case of visual occlusion or variation in the environment stiffness. Here, we investigated whether, in a force-regulation task using a wearable supernumerary robotic arm (SRA), additional vibrotactile feedback can increase the control performance of participants compared to the inherent feedback. Additionally, to make the scenario more realistic, we introduced variations in the SRA’s kinematic posture and in the environment stiffness. Notably, our findings revealed a statistically significant improvement in user performance over all the evaluated metrics while receiving additional vibrotactile feedback. Compared to inherent feedback alone, the additional vibrotactile feedback allowed participants to exert the required force faster (p < 0.01), to maintain it for longer (p < 0.001), and with lower errors (p < 0.001). No discernible effects related to the SRA’s posture or environment stiffness were observed. These results proved the benefits of providing the user with additional vibrotactile feedback to convey the SRA’s force during interaction tasks. |
Human Exteroception during Object Handling with an Upper Limb Exoskeleton
Abstract | ||
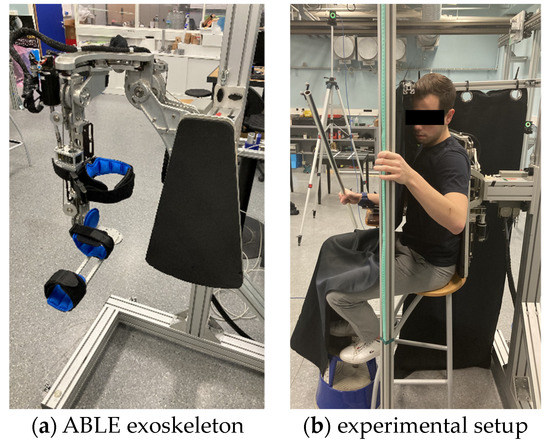 | Upper limb exoskeletons may confer significant mechanical advantages across a range of tasks. The potential consequences of the exoskeleton upon the user’s sensorimotor capacities however, remain poorly understood. The purpose of this study was to examine how the physical coupling of the user’s arm to an upper limb exoskeleton influenced the perception of handheld objects. In the experimental protocol, participants were required to estimate the length of a series of bars held in their dominant right hand, in the absence of visual feedback. Their performance in conditions with an exoskeleton fixed to the forearm and upper arm was compared to conditions without the upper limb exoskeleton. Experiment 1 was designed to verify the effects of attaching an exoskeleton to the upper limb, with object handling limited to rotations of the wrist only. Experiment 2 was designed to verify the effects of the structure, and its mass, with combined movements of the wrist, elbow, and shoulder. Statistical analysis indicated that movements performed with the exoskeleton did not significantly affect perception of the handheld object in experiment 1 (BF01 = 2.3) or experiment 2 (BF01 = 4.3). These findings suggest that while the integration of an exoskeleton complexifies the architecture of the upper limb effector, this does not necessarily impede transmission of the mechanical information required for human exteroception. |
Phantom movement training without classifier performance feedback improves mobilization ability while maintaining EMG pattern classification
Abstract | ||
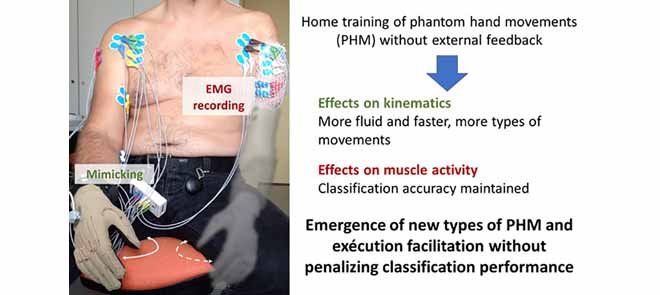 | Voluntary phantom movements are systematically associated with muscle contractions in the residual limb. These latter are specific to the type of movement and can be classified by pattern recognition algorithms. However, phantom mobility generates fatigue that could impact classification metrics. This study explored whether daily phantom movement training at home with no other feedback than inherent somatosensory information can impact the classification success rate. Kinematics and muscle activity were compared between before and after a two-month home training in six major upper limb amputees. Surface EMG patterns were classified to quantify a potential change in the features space with training. Our results showed that this type of training induces faster, smoother, and richer phantom mobility. However, classification metrics did not change with training. When including the new types of movements achievable after training, accuracy did not decrease, indicating that muscle activation patterns associated with these movements were sufficiently different not to interfere with the already existing movement classes. Thus, although phantom training with only somatosensory feedback increases the overall phantom movement capacity, it does not increase the classification success rate. Yet, it is possible that paired with other forms of feedback, phantom training could improve this success rate. |
2022
The Ethics of Supernumerary Robotic Limbs. An Enactivist Approach
Abstract | ||
 | Supernumerary robotic limbs are innovative devices in the field of wearable robotics which can provide humans with unprecedented sensorimotor abilities. However, scholars have raised awareness of the ethical issues that would arise from the large adoption of technologies for human augmentation in society. Most negative attitudes towards such technologies seem to rely on an allegedly clear distinction between therapy and enhancement in the use of technological devices. Based on such distinction, people tend to accept technologies when used for therapeutic purposes (e.g., prostheses), but tend to raise issues when similar devices are used for upgrading a physical or cognitive ability (e.g., supernumerary robotics limbs). However, as many scholars have pointed out, the distinction between therapy and enhancement might be theoretically flawed. In this paper, we present an alternative approach to the ethics of supernumerary limbs which is based on two related claims. First, we propose to conceive supernumerary limbs as tools that necessarily modify our psychological and bodily identity. At the same time, we stress that such a modification is not ethically bad in itself; on the contrary, it drives human interaction with the environment. Second, by comparing our view with the extended mind thesis, we claim that the mediation through tools is crucial for the formation of novel meanings and skills that constitute human interaction with the world. We will relate the latter claim to enactivism as a helpful theoretical perspective to frame issues related to artificial limbs and, more in general, to technologies for augmentation. Based on this approach, we finally sketch some suggestions for future directions in the ethics of supernumerary limbs. |
Simultaneous control of 2DOF upper-limb prosthesis with body compensations-based control: a multiple cases study
Abstract | ||
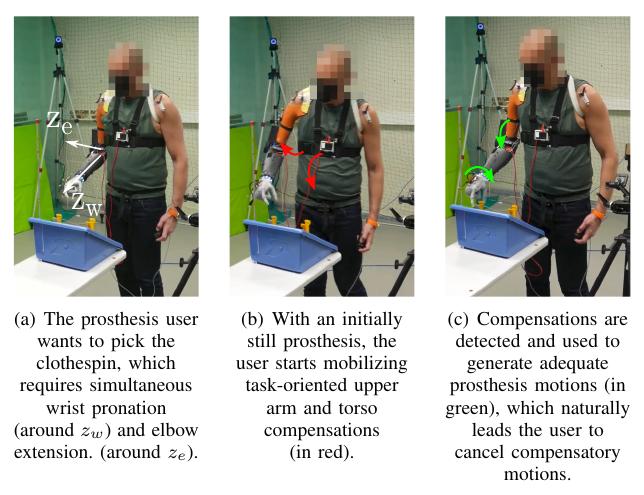 | Controlling several joints simultaneously is a common feature of natural arm movements. Robotic prostheses shall offer this possibility to their wearer. Yet, existing approaches to control a robotic upper-limb prosthesis from myoelectric interfaces do not satisfactorily respond to this need: standard methods provide sequential jointby-joint motion control only; advanced pattern recognitionbased approaches allow the control of a limited subset of synchronized multi-joint movements and remain complex to set up. In this paper, we exploit a control method of an upper-limb prosthesis based on body motion measurement called Compensations Cancellation Control (CCC). It offers a straightforward simultaneous control of the intermediate joints, namely the wrist and the elbow. Four transhumeral amputated participants performed the Refined Rolyan Clothespin Test with an experimental prosthesis alternatively running CCC and conventional joint-by-joint myoelectric control. Task performance, joint motions, body compensations and cognitive load were assessed. This experiment shows that CCC restores simultaneity between prosthetic joints while maintaining the level of performance of conventional myoelectric control (used on a daily basis by three participants), without increasing compensatory motions nor cognitive load. |
Identification of inverse kinematic parameters in redundant systems: Towards quantification of inter-joint coordination in the human upper extremity
Abstract | ||
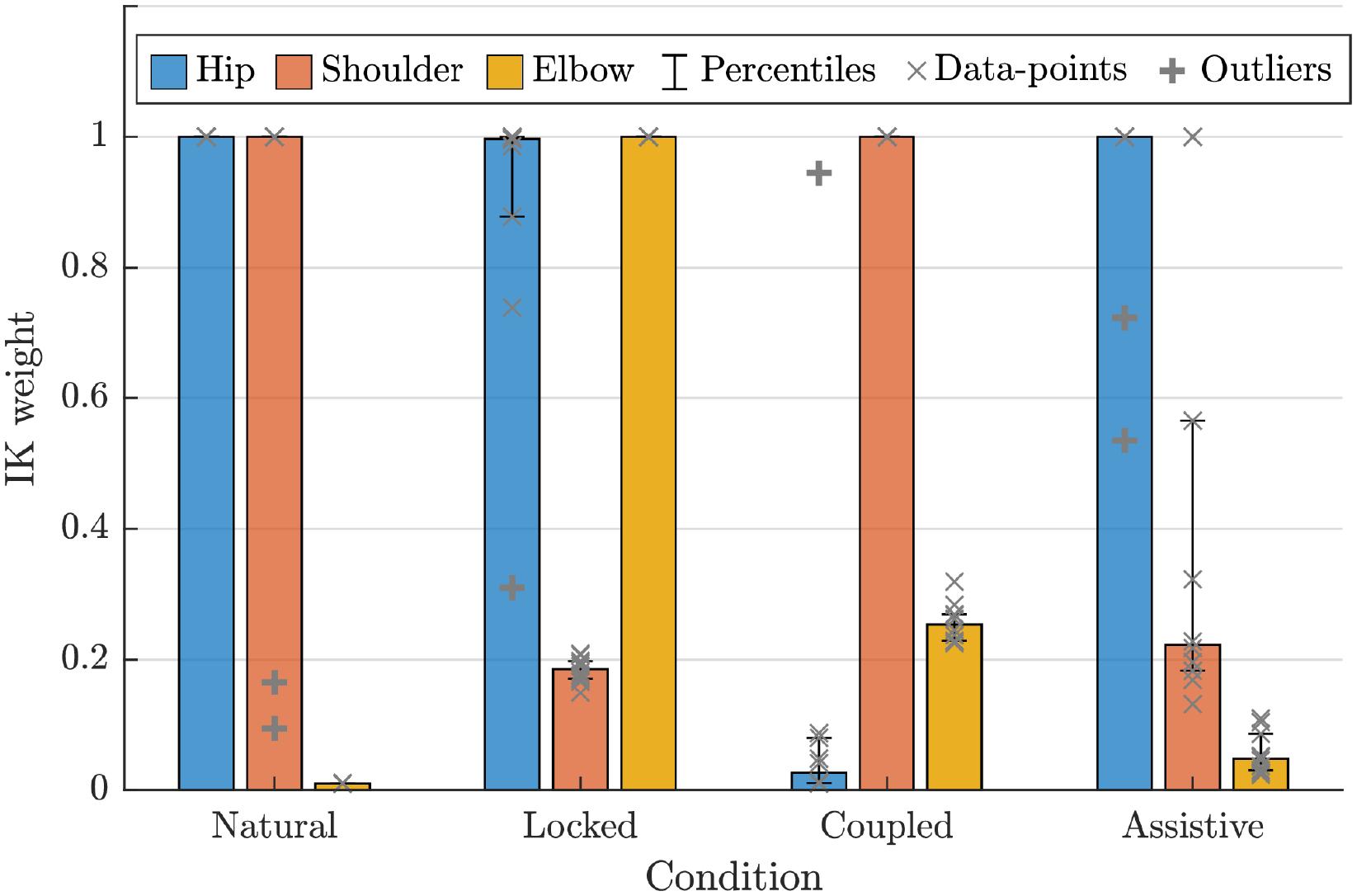 | Understanding and quantifying inter-joint coordination is valuable in several domains such as neurorehabilitation, robot-assisted therapy, robotic prosthetic arms, and control of supernumerary arms. Inter-joint coordination is often understood as a consistent spatiotemporal relation among kinematically redundant joints performing functional and goal-oriented movements. However, most approaches in the literature to investigate inter-joint coordination are limited to analysis of the end-point trajectory or correlation analysis of the joint rotations without considering the underlying task; e.g., creating a desirable hand movement toward a goal as in reaching motions. This work goes beyond this limitation by taking a model-based approach to quantifying inter-joint coordination. More specifically, we use the weighted pseudo-inverse of the Jacobian matrix and its associated null-space to explain the human kinematics in reaching tasks. We propose a novel algorithm to estimate such Inverse Kinematics weights from observed kinematic data. These estimated weights serve as a quantification for spatial inter-joint coordination; i.e., how costly a redundant joint is in its contribution to creating an end-effector velocity. We apply our estimation algorithm to datasets obtained from two different experiments. In the first experiment, the estimated Inverse Kinematics weights pinpoint how individuals change their Inverse Kinematics strategy when exposed to the viscous field wearing an exoskeleton. The second experiment shows how the resulting Inverse Kinematics weights can quantify a robotic prosthetic arm’s contribution (or the level of assistance). |
Kinematic analysis of impairments and compensatory motor behavior during prosthetic grasping in below-elbow amputees
Abstract | ||
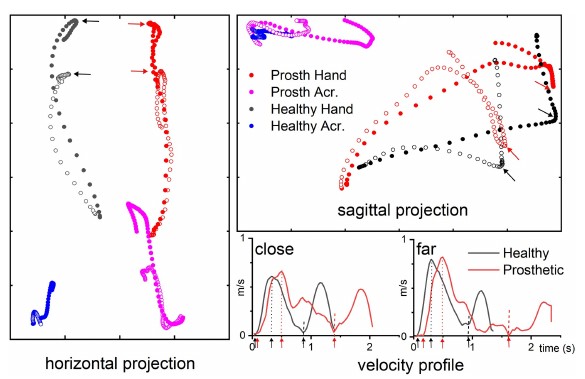 | After a major upper limb amputation, the use of myoelectric prosthesis as assistive devices is possible. However, these prostheses remain quite difficult to control for grasping and manipulation of daily life objects. The aim of the present observational case study is to document the kinematics of grasping in a group of 10 below-elbow amputated patients fitted with a myoelectric prosthesis in order to describe and better understand their compensatory strategies. They performed a grasping to lift task toward 3 objects (a mug, a cylinder and a cone) placed at two distances within the reaching area in front of the patients. The kinematics of the trunk and upper-limb on the non-amputated and prosthetic sides were recorded with 3 electromagnetic Polhemus sensors placed on the hand, the forearm (or the corresponding site on the prosthesis) and the ipsilateral acromion. The 3D position of the elbow joint and the shoulder and elbow angles were calculated thanks to a preliminary calibration of the sensor position. We examined first the effect of side, distance and objects with non-parametric statistics. Prosthetic grasping was characterized by severe temporo-spatial impairments consistent with previous clinical or kinematic observations. The grasping phase was prolonged and the reaching and grasping components uncoupled. The 3D hand displacement was symmetrical in average, but with some differences according to the objects. Compensatory strategies involved the trunk and the proximal part of the upper-limb, as shown by a greater 3D displacement of the elbow for close target and a greater forward displacement of the acromion, particularly for far targets. The hand orientation at the time of grasping showed marked side differences with a more frontal azimuth, and a more “thumb-up” roll. The variation of hand orientation with the object on the prosthetic side, suggested that the lack of finger and wrist mobility imposed some adaptation of hand pose relative to the object. The detailed kinematic analysis allows more insight into the mechanisms of the compensatory strategies that could be due to both increased distal or proximal kinematic constraints. A better knowledge of those compensatory strategies is important for the prevention of musculoskeletal disorders and the development of innovative prosthetics. |
Virtually turning robotic manipulators into worn devices: opening new horizons for wearable assistive robotics
Abstract | ||
 | Robotic sensorimotor extensions (supernumerary limbs, prosthesis, handheld tools) are worn devices used to interact with the nearby environment, whether to assist the capabilities of impaired users or to enhance the dexterity of industrial operators. Despite numerous mechanical achievements, embedding these robotics devices remains critical due to their weight and discomfort. To emancipate from these mechanical constraints, we propose a new hybrid system using a virtual worn robotic arm in augmented-reality, and a real robotic manipulator servoed on such virtual representation. We aim at bringing an illusion of wearing a robotic system while its weight is fully deported, thinking that this approach opens new horizons for the study or wearable robotics without any intrinsic impairment of the human motions. |
2021
Measuring mental workload in assistive wearable devices: a review
Abstract | ||
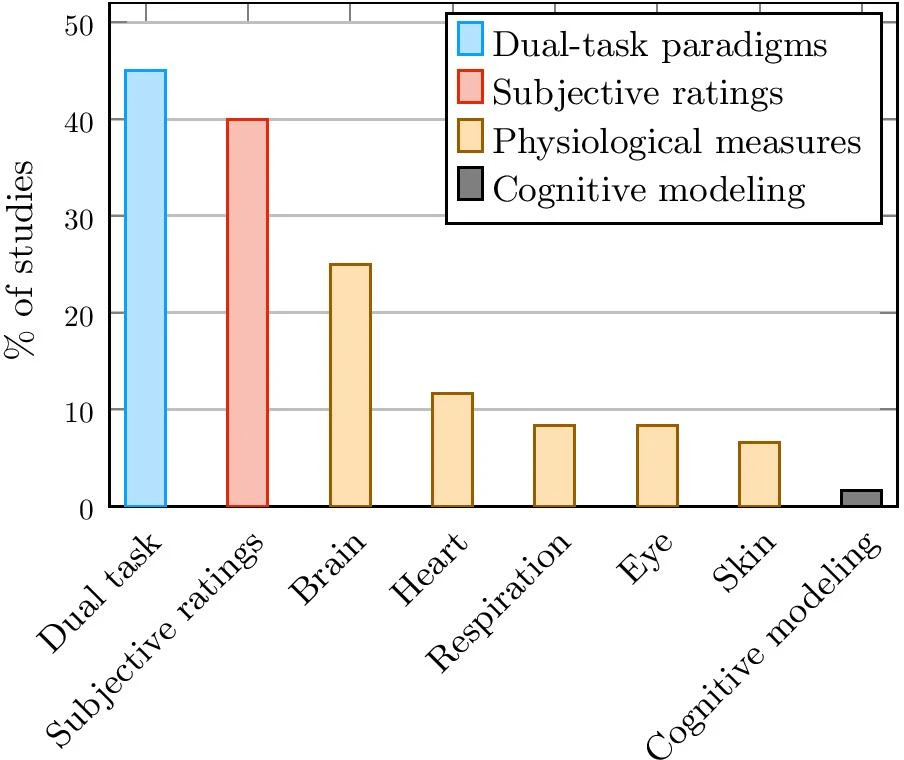 | As wearable assistive devices, such as prostheses and exoskeletons, become increasingly sophisticated and effective, the mental workload associated with their use remains high and becomes a major challenge to their ecological use and long-term adoption. Numerous methods of measuring mental workload co-exist, making analysis of this research topic difficult. The aim of this review is to examine how mental workload resulting from the use of wearable assistive devices has been measured, in order to gain insight into the specific possibilities and limitations of this field. Literature searches were conducted in the main scientific databases and 60 articles measuring the mental workload induced by the use of a wearable assistive device were included in this study. Three main families of methods were identified, the most common being ’dual task’ and ’subjective assessment’ methods, followed by those based on ’physiological measures’, which included a wide variety of methods. The variability of the measurements was particularly high, making comparison difficult. There is as yet no evidence that any particular method of measuring mental workload is more appropriate to the field of wearable assistive devices. Each method has intrinsic limitations such as subjectivity, imprecision, robustness or complexity of implementation or interpretation. A promising metric seems to be the measurement of brain activity, as it is the only method that is directly related to mental workload. Finally, regardless of the measurement method chosen, special attention should be paid to the measurement of mental workload in the context of wearable assistive devices. In particular, certain practical considerations, such as ecological situations and environments or the level of expertise of the participants tested, may be essential to ensure the validity of the mental workload assessed. |
Closing the loop between body compensations and upper-limb prosthetic movements: a feasibility study
Abstract | ||
 | To control the robotic joints of an upper limb prosthesis, most existing approaches rely on decoding the user motor intention from electrophysiological signals produced by the subject, and then executing the desired movement. This suffers from important limitations and requires extended training, particularly when a large number of prosthetic joints have to be controlled. Even when they master the control of their prosthesis, many amputees underuse the prosthetic mobility to the benefit of compensatory body movements, whose generation is less expensive and more natural from a cognitive point of view. Indeed, with an arm prosthesis, hand movements result from a combination of human and robotic joint motions. We propose in this paper to use these compensatory motions as an error signal to servo the robotic controller. This approach thus creates a coupling between body compensations and prosthetic movements. To study the feasibility of such a coupling, the concept is tested with ten able-bodied subjects wearing an emulated elbow prosthesis and one congenital arm amputee. The results validate the concept, which allows naive subjects to control the prosthetic joint with no or very short training period. |
Impairment and Compensation in Dexterous Upper-Limb Function After Stroke. From the Direct Consequences of Pyramidal Tract Lesions to Behavioral Involvement of Both Upper-Limbs in Daily Activities
Abstract | ||
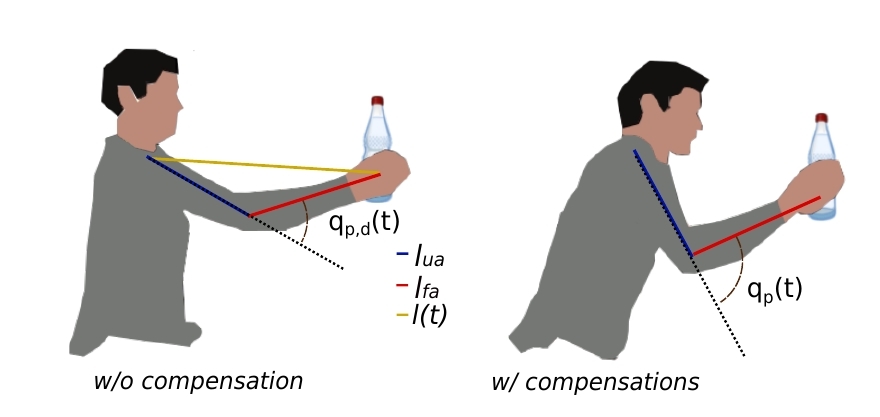
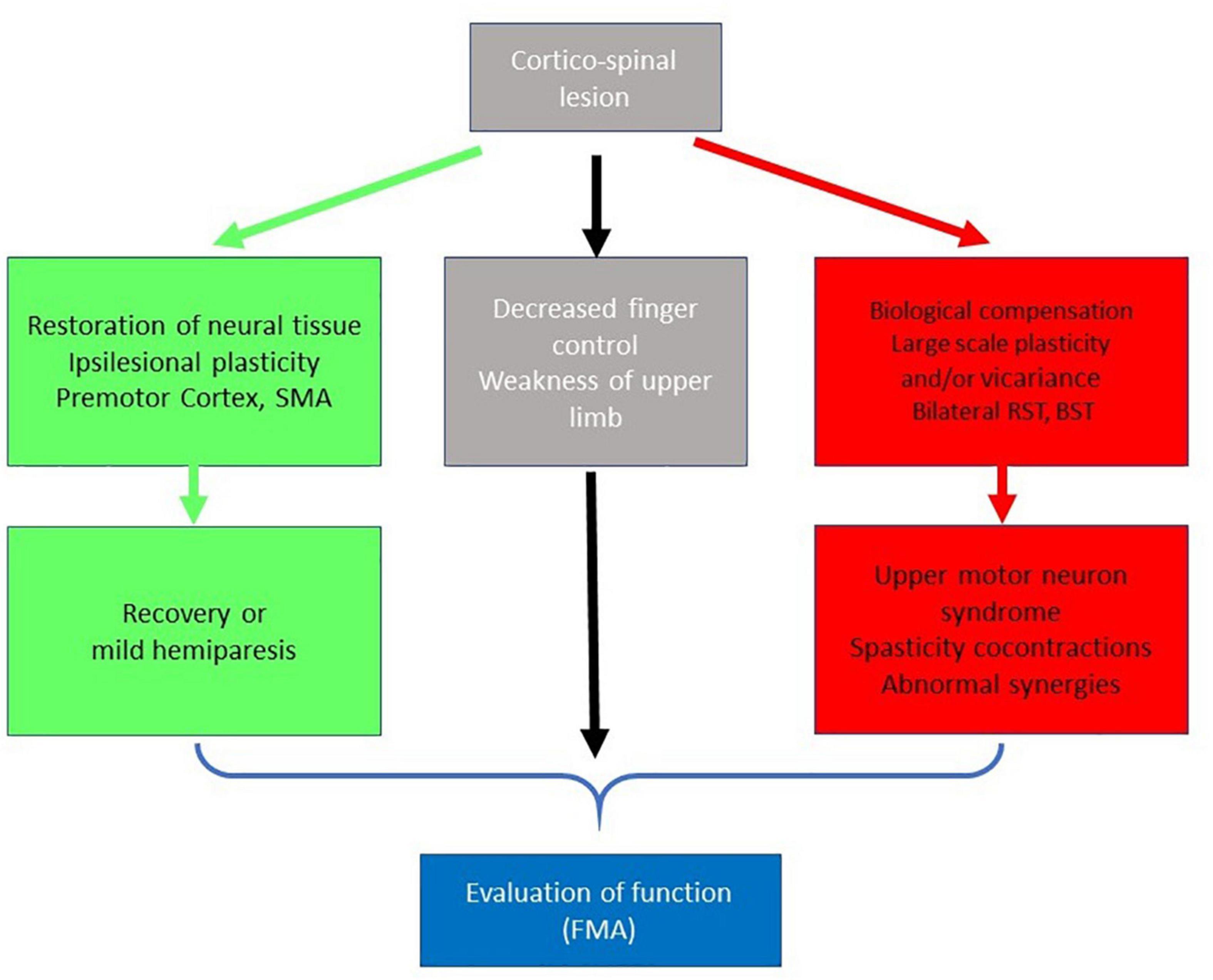 | Impairments in dexterous upper limb function are a significant cause of disability following stroke. While the physiological basis of movement deficits consequent to a lesion in the pyramidal tract is well demonstrated, specific mechanisms contributing to optimal recovery are less apparent. Various upper limb interventions (motor learning methods, neurostimulation techniques, robotics, virtual reality, and serious games) are associated with improvements in motor performance, but many patients continue to experience significant limitations with object handling in everyday activities. Exactly how we go about consolidating adaptive motor behaviors through the rehabilitation process thus remains a considerable challenge. An important part of this problem is the ability to successfully distinguish the extent to which a given gesture is determined by the neuromotor impairment and that which is determined by a compensatory mechanism. This question is particularly complicated in tasks involving manual dexterity where prehensile movements are contingent upon the task (individual digit movement, grasping, and manipulation…) and its objective (placing, two step actions…), as well as personal factors (motivation, acquired skills, and life habits…) and contextual cues related to the environment (presence of tools or assistive devices…). Presently, there remains a lack of integrative studies which differentiate processes related to structural changes associated with the neurological lesion and those related to behavioral change in response to situational constraints. In this text, we shall question the link between impairments, motor strategies and individual performance in object handling tasks. This scoping review will be based on clinical studies, and discussed in relation to more general findings about hand and upper limb function (manipulation of objects, tool use in daily life activity). We shall discuss how further quantitative studies on human manipulation in ecological contexts may provide greater insight into compensatory motor behavior in patients with a neurological impairment of dexterous upper-limb function. |
Anticipation and compensation for somatosensory deficits in object handling: evidence from a patient with large fibre sensory neuropathy
Abstract | ||
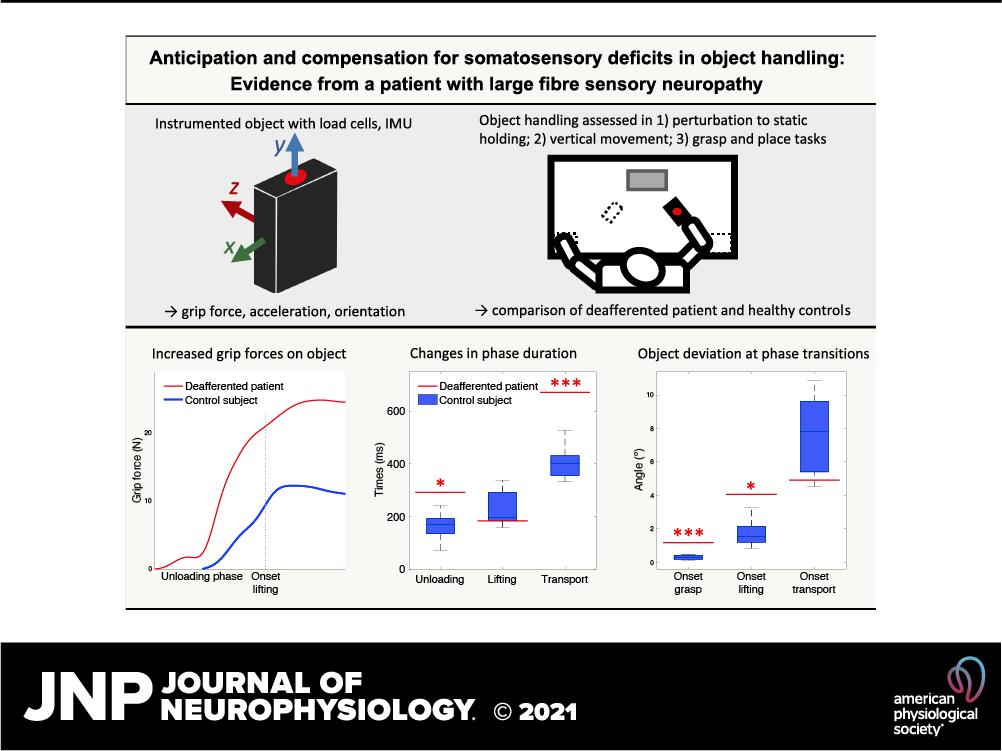 | The purpose of this study was to determine the contributions of feedforward and feedback processes on grip force regulation and object orientation during functional manipulation tasks. One patient with massive somatosensory loss resulting from large fibre sensory neuropathy, and ten control participants were recruited. Three experiments were conducted: 1) perturbation to static holding; 2) discrete vertical movement; and 3) functional grasp and place. The availability of visual feedback was also manipulated to assess the nature of compensatory mechanisms. Results from experiment 1 indicated that both the deafferented patient and controls used anticipatory grip force adjustments prior to self-induced perturbation to static holding. The patient exhibited increased grip response time, but the magnitude of grip force adjustments remained correlated with perturbation forces in the self-induced and external perturbation conditions. In experiment 2, the patient applied peak grip force substantially in advance of maximum load force. Unlike controls, the patient's ability to regulate object orientation was impaired without visual feedback. In experiment 3, the duration of unloading, transport and release phases were longer for the patient, with increased deviation of object orientation at phase transitions. These findings show that the deafferented patient uses distinct modes of anticipatory control according to task constraints, and that responses to perturbations are mediated by alternative afferent information. The loss of somatosensory feedback thus appears to impair control of object orientation, while variation in the temporal organization of functional tasks may reflect strategies to mitigate object instability associated with changes in movement dynamics. |
2020
Guiding the Training of Users With a Pattern Similarity Biofeedback to Improve the Performance of Myoelectric Pattern Recognition
Abstract | ||
 | Most transhumeral amputated individuals deplore the lack of functionality of their prosthesis due to control-related limitations. Commercialized prosthetic elbows are controlled via myoelectric signals, yielding complex control schemes when users have to control an entire prosthetic limb. Limited control yields the development of compensatory strategies. An alternative control strategy associates residual limb motions to automatize the prosthetic elbow motion using a model of physiological shoulder/elbow synergies. Preliminary studies have shown that elbow motion could be predicted from residual limb kinematic measurements, but results with transhumeral amputated individuals were lacking. This study focuses on the experimental assessment of automatic prosthetic elbow control during a reaching task, compared to conventional myoelectric control, with six transhumeral amputated individuals, among whom, three had an osseointegrated device. Part of the recruited participants had an osseointegrated prosthetic device. The task was achieved within physiological precision errors with both control modes. Automatic elbow control reduced trunk compensations, and restored a physiologically-like shoulder/elbow movement synchronization. However, the kinematic assessment showed that amputation and prosthesis wear modifies the shoulder movements in comparison with physiological shoulder kinematics. Overall, participants described the automatic elbow control strategy as intuitive, and this work highlights the interest of automatized prosthetic elbow motion. |
Using Generic Upper-Body Movement Strategies in a Free Walking Setting to Detect Gait Initiation Intention in a Lower-Limb Exoskeleton
Abstract | ||
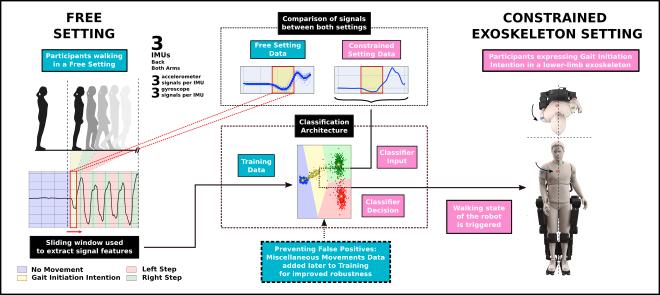 | In recent years, lower-limb exoskeletons have been marketed to become a possible alternative to wheelchairs for people with walking impairments or paralysis. However, most assistive exoskeletons rely on constraining control strategies based on remote controls or torso tilting events. One approach to build more intuitive control interfaces would be to exploit knowledge on human motor control, and the coordination between upper and lower limb movements during gait events, such as the anticipatory postural adjustments that precede gait initiation. In this study, it was hypothesized that generic trunk and arm movements preceding gait in a free walking setting in able-bodied users can still be retrieved while wearing an assistive lower-limb exoskeleton that constrains their leg movements. This was evaluated on a group of eight unimpaired participants, and analysis of upper-body wearable IMU signals showed similarity of pos-tural adjustments between the free and exoskeleton-constrained settings. Additionally, a classification architecture showed that the walking state of the robot can be correctly triggered based on free-walking data gathered from all participants with an accuracy rate of 95%. This suggests that interlimb coordination still exists in a constrained setting, and could pave the road towards the elaboration of more natural controls for assistive lower-limb exoskeletons. |
Assessment of an automatic prosthetic elbow control strategy using residual limb motion for transhumeral amputated individuals with socket or osseointegrated prostheses
Abstract | ||
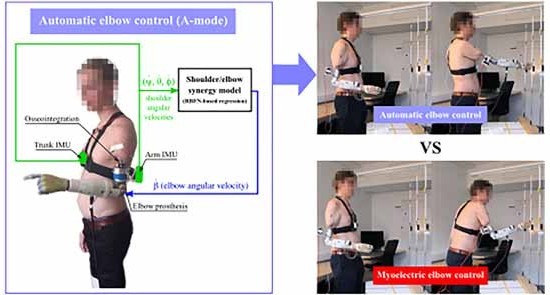 | Most transhumeral amputated individuals deplore the lack of functionality of their prosthesis due to control-related limitations. Commercialized prosthetic elbows are controlled via myoelectric signals, yielding complex control schemes when users have to control an entire prosthetic limb. Limited control yields the development of compensatory strategies. An alternative control strategy associates residual limb motions to automatize the prosthetic elbow motion using a model of physiological shoulder/elbow synergies. Preliminary studies have shown that elbow motion could be predicted from residual limb kinematic measurements, but results with transhumeral amputated individuals were lacking. This study focuses on the experimental assessment of automatic prosthetic elbow control during a reaching task, compared to conventional myoelectric control, with six transhumeral amputated individuals, among whom, three had an osseointegrated device. Part of the recruited participants had an osseointegrated prosthetic device. The task was achieved within physiological precision errors with both control modes. Automatic elbow control reduced trunk compensations, and restored a physiologically-like shoulder/elbow movement synchronization. However, the kinematic assessment showed that amputation and prosthesis wear modifies the shoulder movements in comparison with physiological shoulder kinematics. Overall, participants described the automatic elbow control strategy as intuitive, and this work highlights the interest of automatized prosthetic elbow motion. |
2019
Experimental and theoretical study of velocity fluctuations during slow movements in humans
Abstract | ||
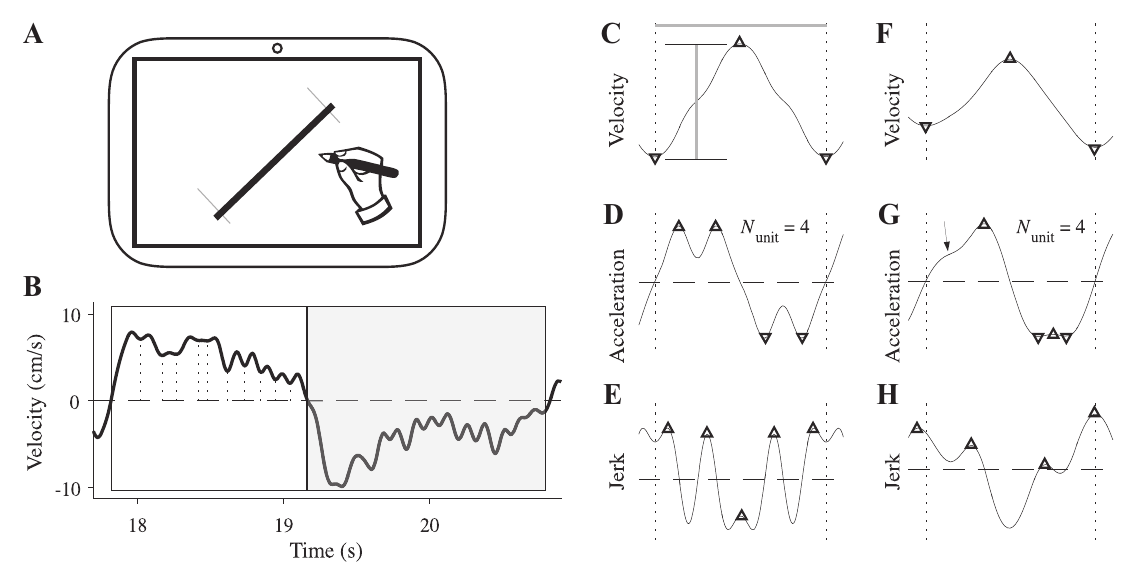 | Moving smoothly is generally considered as a higher-order goal of motor control and moving jerkily as a witness of clumsiness or pathology, yet many common and well-controlled movements (e.g., tracking movements) have irregular velocity profiles with widespread fluctuations. The origin and nature of these fluctuations have been associated with the operation of an intermittent process but in fact remain poorly understood. Here we studied velocity fluctuations during slow movements, using combined experimental and theoretical tools. We recorded arm movement trajectories in a group of healthy participants performing back-and-forth movements at different speeds, and we analyzed velocity profiles in terms of series of segments (portions of velocity between 2 minima). We found that most of the segments were smooth (i.e., corresponding to a biphasic acceleration) and had constant duration irrespective of movement speed and linearly increasing amplitude with movement speed. We accounted for these observations with an optimal feedback control model driven by a staircase goal position signal in the presence of sensory noise. Our study suggests that one and the same control process can explain the production of fast and slow movements, i.e., fast movements emerge from the immediate tracking of a global goal position and slow movements from the successive tracking of intermittently updated intermediate goal positions. |
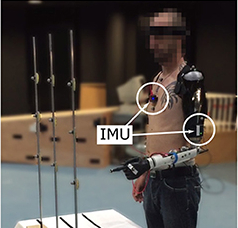
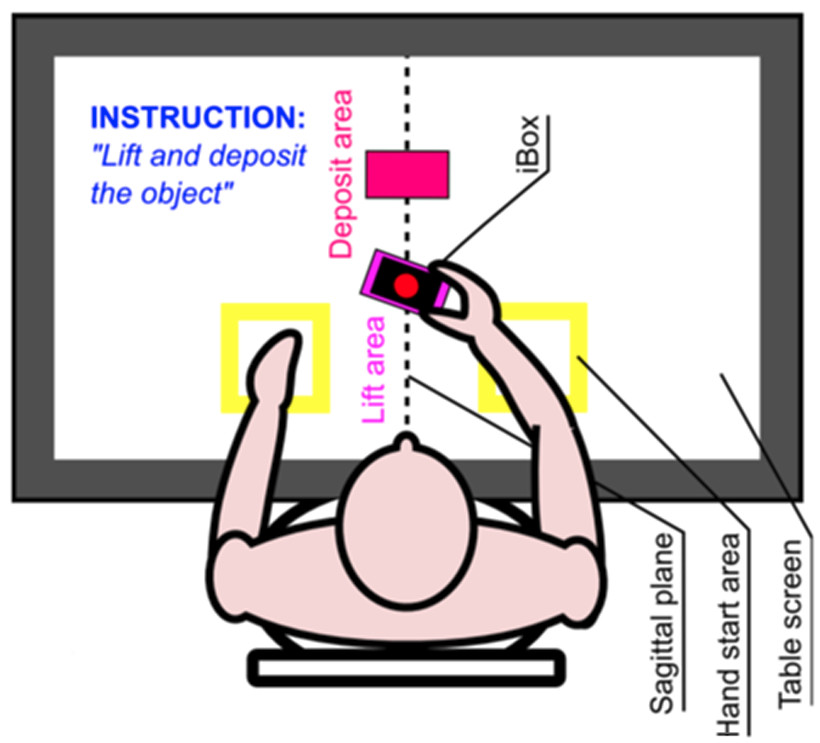
Effects of hand configuration on the grasping, holding and placement of an instrumented object in patients with hemiparesis
Abstract | ||
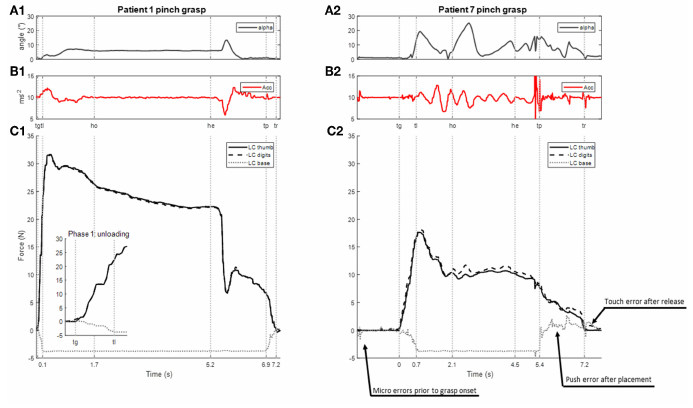 | Limitations with manual dexterity are an important problem for patients suffering from hemiparesis post stroke. Sensorimotor deficits, compensatory strategies and the use of alternative grasping configurations may influence the efficiency of prehensile motor behavior. The aim of the present study is to examine how different grasp configurations affect patient ability to regulate both grip forces and object orientation when lifting, holding and placing an object. Twelve stroke patients with mild to moderate hemiparesis were recruited. Each was required to lift, hold and replace an instrumented object. Four different grasp configurations were tested on both the hemiparetic and less affected arms. Load cells from each of the 6 faces of the instrumented object and an integrated inertial measurement unit were used to extract data regarding the timing of unloading/loading phases, regulation of grip forces, and object orientation throughout the task. Grip forces were greatest when using a palmar-digital grasp and lowest when using a top grasp. The time delay between peak acceleration and maximum grip force was also greatest for palmar-digital grasp and lowest for the top grasp. Use of the hemiparetic arm was associated with increased duration of the unloading phase and greater difficulty with maintaining the vertical orientation of the object at the transitions to object lifting and object placement. The occurrence of touch and push errors at the onset of grasp varied according to both grasp configuration and use of the hemiparetic arm. Stroke patients exhibit impairments in the scale and temporal precision of grip force adjustments and reduced ability to maintain object orientation with various grasp configurations using the hemiparetic arm. Nonetheless, the timing and magnitude of grip force adjustments may be facilitated using a top grasp configuration. Conversely, whole hand prehension strategies compound difficulties with grip force scaling and inhibit the synchrony of grasp onset and object release. |
2018
Phantom-mobility-based prosthesis control in transhumeral amputees without surgical reinnervation: a preliminary study
Abstract | ||
 | Transhumeral amputees face substantial difficulties in efficiently controlling their prosthetic limb, leading to a high rate of rejection of these devices. Actual myoelectric control approaches make their use slow, sequential and unnatural, especially for these patients with a high level of amputation who need a prosthesis with numerous active degrees of freedom (powered elbow, wrist, and hand). While surgical muscle-reinnervation is becoming a generic solution for amputees to increase their control capabilities over a prosthesis, research is still being conducted on the possibility of using the surface myoelectric patterns specifically associated to voluntary Phantom Limb Mobilization (PLM), appearing naturally in most upper-limb amputees without requiring specific surgery. The objective of this study was to evaluate the possibility for transhumeral amputees to use a PLM-based control approach to perform more realistic functional grasping tasks. Two transhumeral amputated participants were asked to repetitively grasp one out of three different objects with an unworn eight-active-DoF prosthetic arm and release it in a dedicated drawer. The prosthesis control was based on phantom limb mobilization and myoelectric pattern recognition techniques, using only two repetitions of each PLM to train the classification architecture. The results show that the task could be successfully achieved with rather optimal strategies and joint trajectories, even if the completion time was increased in comparison with the performances obtained by a control group using a simple GUI control, and the control strategies required numerous corrections. While numerous limitations related to robustness of pattern recognition techniques and to the perturbations generated by actual wearing of the prosthesis remain to be solved, these preliminary results encourage further exploration and deeper understanding of the phenomenon of natural residual myoelectric activity related to PLM, since it could possibly be a viable option in some transhumeral amputees to extend their control abilities of functional upper limb prosthetics with multiple active joints without undergoing muscular reinnervation surgery. |
Characteristics of phantom upper limb mobility encourage phantom-mobility-based prosthesis control
Abstract | ||
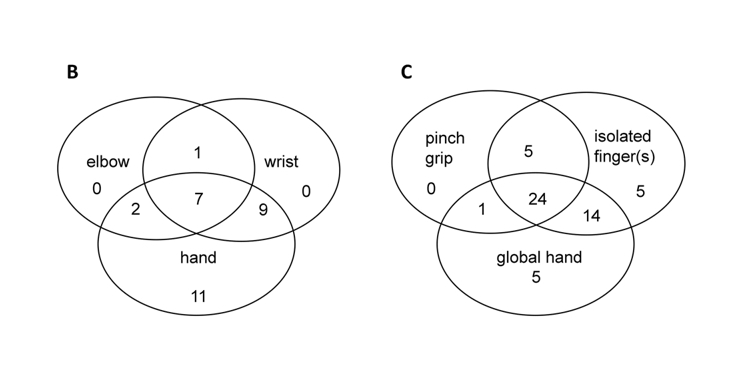 | There is an increasing need to extend the control possibilities of upper limb amputees over their prosthetics, especially given the development of devices with numerous active joints. One way of feeding pattern recognition myoelectric control is to rely on the myoelectric activities of the residual limb associated with phantom limb movements (PLM). This study aimed to describe the types, characteristics, potential influencing factors and trainability of upper limb PLM. Seventy-six below- and above-elbow amputees with major amputation underwent a semi-directed interview about their phantom limb. Amputation level, elapsed time since amputation, chronic pain and use of prostheses of upper limb PLM were extracted from the interviews. Thirteen different PLM were found involving the hand, wrist and elbow. Seventy-six percent of the patients were able to produce at least one type of PLM; most of them could execute several. Amputation level, elapsed time since amputation, chronic pain and use of myoelectric prostheses were not found to influence PLM. Five above-elbow amputees participated in a PLM training program and consequently increased both endurance and speed of their PLM. These results clearly encourage further research on PLM-associated muscle activation patterns for future PLM-based modes of prostheses control. |
Movement-based control for upper-limb prosthetics: is the regression technique the key to a robust and accurate control?
Abstract | ||
 | Due to the limitations of myoelectric control (such as dependence on muscular fatigue and on electrodes shift, difficulty in decoding complex patterns or in dealing with simultaneous movements), there is a renewal of interest in the movement-based control approaches for prosthetics. The latter use residual limb movements rather than muscular activity as command inputs, in order to develop more natural and intuitive control techniques. Among those, several research works rely on the interjoint coordinations that naturally exist in human upper limb movements. These relationships are modeled to control the distal joints (e.g. elbow) based on the motions of proximal ones (e.g. shoulder). The regression techniques, used to model the coordinations, are various (Artificial Neural Networks, Principal Components Analysis, etc.) and yet, analysis of their performance and impact on the prosthesis control is missing in the literature. Is there one technique really more efficient than the others to model interjoint coordinations? To answer this question, we conducted an experimental campaign to compare the performance of three common regression techniques in the control of the elbow joint on a transhumeral prosthesis. Ten non-disabled subjects performed a reaching task, while wearing an elbow prosthesis which was driven by several interjoint coordination models obtained through different regression techniques. The models of the shoulder-elbow kinematic relationship were built from the recordings of fifteen different non-disabled subjects that performed a similar reaching task with their healthy arm. Among Radial Basis Function Networks (RBFN), Locally Weighted Regression (LWR) and Principal Components Analysis (PCA), RBFN was found to be the most robust, based on the analysis of several criteria including the quality of generated movements but also the compensatory strategies exhibited by users. Yet, RBFN does not significantly outperform LWR and PCA. The regression technique seems not to be the most significant factor for improvement of interjoint coordinations-based control. By characterizing the impact of the modeling techniques through closed-loop experiments with human users instead of purely offline simulations, this work could also help in improving movement-based control approaches and in bringing them closer to a real use by patients. |
Force, Impedance and Trajectory Learning for Contact Tooling and Haptic Identification
Abstract | ||
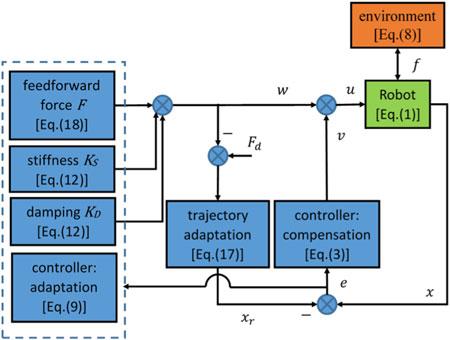 | Humans can skilfully use tools and interact with the environment by adapting their movement trajectory, contact force, and impedance. Motivated by the human versatility, we develop here a robot controller that concurrently adapts feedforward force, impedance, and reference trajectory when interacting with an unknown environment. In particular, the robot’s reference trajectory is adapted to limit the interaction force and maintain it at a desired level, while feedforward force and impedance adaptation compensates for the interaction with the environment. An analysis of the interaction dynamics using Lyapunov theory yields the conditions for convergence of the closed-loop interaction mediated by this controller. Simulations exhibit adaptive properties similar to human motor adaptation. The implementation of this controller for typical interaction tasks including drilling, cutting, and haptic exploration shows that this controller can outperform conventional controllers in contact tooling. |
Can we achieve intuitive prosthetic elbow control based on healthy upper limb motor?
Abstract | ||
 | Most transhumeral amputees report that their prosthetic device lacks functionality, citing the control strategy as a major limitation. Indeed, they are required to control several degrees of freedom with muscle groups primarily used for elbow actuation. As a result, most of them choose to have a one-degree-of-freedom myoelectric hand for grasping objects, a myoelectric wrist for pronation/supination, and a body-powered elbow. Unlike healthy upper limb movements, the prosthetic elbow joint angle, adjusted prior to the motion, is not involved in the overall upper limb movements, causing the rest of the body to compensate for the lack of mobility of the prosthesis. A promising solution to improve upper limb prosthesis control exploits the residual limb mobility: like in healthy movements, shoulder and prosthetic elbow motions are coupled using inter-joint coordination models. The present study aims to test this approach. A transhumeral amputated individual used a prosthesis with a residual limb motion-driven elbow to point at targets. The prosthetic elbow motion was derived from IMU-based shoulder measurements and a generic model of inter-joint coordinations built from healthy individuals data. For comparison, the participant also performed the task while the prosthetic elbow was implemented with his own myoelectric control strategy. The results show that although the transhumeral amputated participant achieved the pointing task with a better precision when the elbow was myoelectrically-controlled, he had to develop large compensatory trunk movements. Automatic elbow control reduced trunk displacements, and enabled a more natural body behavior with synchronous shoulder and elbow motions. However, due to socket impairments, the residual limb amplitudes were not as large as those of healthy shoulder movements. Therefore, this work also investigates if a control strategy whereby prosthetic joints are automatized according to healthy individuals' coordination models can lead to an intuitive and natural prosthetic control. |
2017
Taxonomy based analysis of force exchanges during multi-digital object grasping and manipulation
Abstract | ||
 | The flexibility of the human hand in object manipulation is essential for daily life activities, but remains relatively little explored with quantitative methods. On the one hand, recent taxonomies describe qualitatively the classes of hand postures for object grasping and manipulation. On the other hand, the quantitative analysis of hand function has been generally restricted to precision grip (with thumb and index opposition) during lifting tasks. The aim of the present study is to fill the gap between these two kinds of descriptions, by investigating quantitatively the forces exerted by the hand on an instrumented object in a set of representative manipulation tasks. The object was a parallelepiped object able to measure the force exerted on the six faces and its acceleration. The grasping force was estimated from the lateral force and the unloading force from the bottom force. The protocol included eleven tasks with complementary constraints inspired by recent taxonomies: four tasks corresponding to lifting and holding the object with different grasp configurations, and seven to manipulating the object (rotation around each of its axis and translation). The grasping and unloading forces and object rotations were measured during the five phases of the actions: unloading, lifting, holding or manipulation, preparation to deposit, and deposit. The results confirm the tight regulation between grasping and unloading forces during lifting, and extend this to the deposit phase. In addition, they provide a precise description of the regulation of force exchanges during various manipulation tasks spanning representative actions of daily life. The timing of manipulation showed both sequential and overlapping organization of the different sub-actions, and micro-errors could be detected. This phenomenological study confirms the feasibility of using an instrumented object to investigate complex manipulative behavior in humans. This protocol will be used in the future to investigate upper-limb dexterity in patients with sensory-motor impairments. |
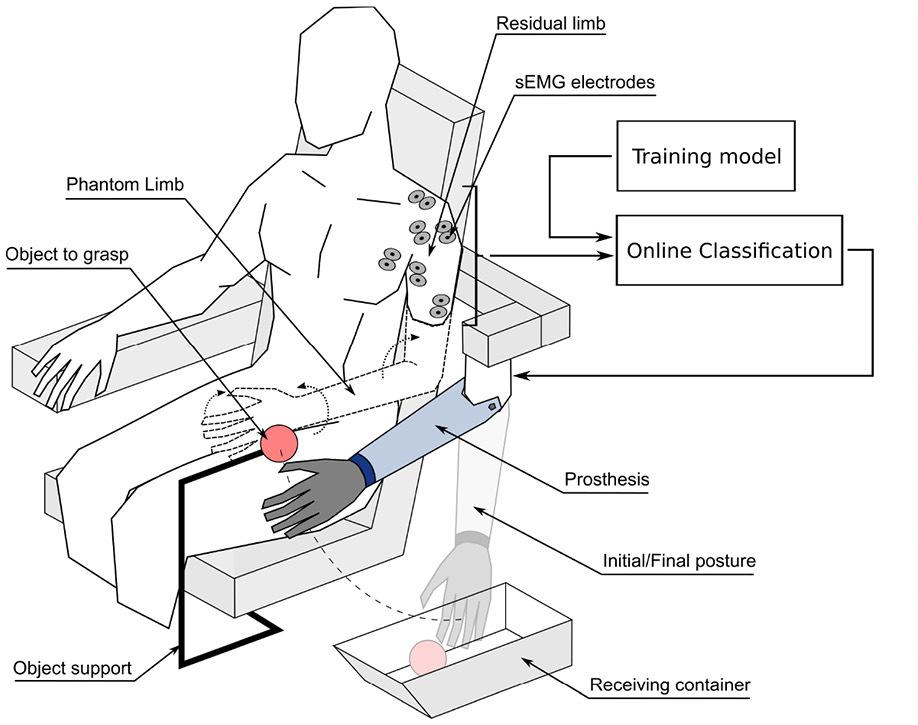
Classification of Phantom Finger, Hand, Wrist and Elbow Voluntary Gestures in Transhumeral Amputees with sEMG
Abstract | ||
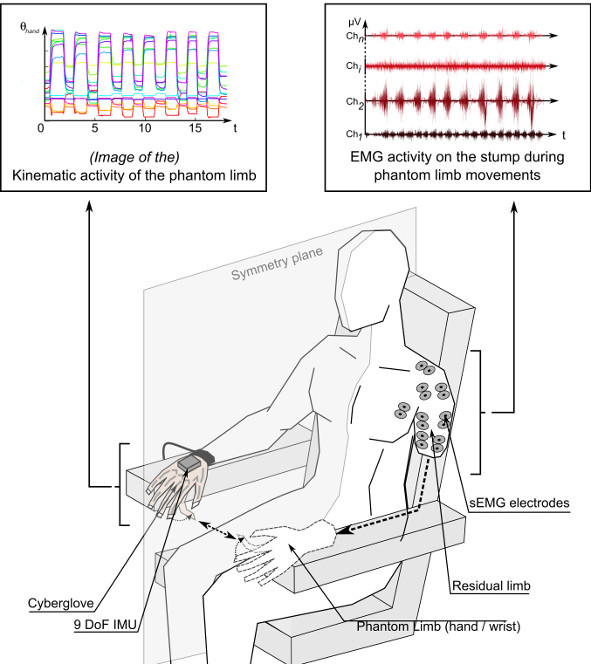 | Decoding finger and hand movements from sEMG electrodes placed on the forearm of transradial amputees has been commonly studied by many research groups. A few recent studies have shown an interesting phenomenon: simple correlations between distal phantom finger, hand and wrist voluntary movements and muscle activity in the residual upper arm in transhumeral amputees, i.e., of muscle groups that, prior to amputation, had no physical effect on the concerned hand and wrist joints. In this study, we are going further into the exploration of this phenomenon by setting up an evaluation study of phantom finger, hand, wrist and elbow (if present) movement classification based on the analysis of surface electromyographic (sEMG) signals measured by multiple electrodes placed on the residual upper arm of 5 transhumeral amputees with a controllable phantom limb who did not undergo any reinnervation surgery. We showed that with a state-of-the-art classification architecture, it is possible to correctly classify phantom limb activity (up to 14 movements) with a rather important average success (over 80% if considering basic sets of 6 hand, wrist and elbow movements) and to use this pattern recognition output to give online control of a device (here a graphical interface) to these transhumeral amputees. Beyond changing the way the phantom limb condition is apprehended by both patients and clinicians, such results could pave the road towards a new control approach for transhumeral amputated patients with a voluntary controllable phantom limb. This could ease and extend their control abilities of functional upper limb prosthetics with multiple active joints without undergoing muscular reinnervation surgery. |
SITAR: a system for independent task-oriented assessment and rehabilitation
Abstract | ||
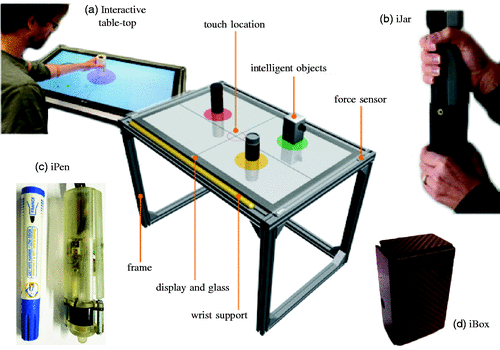 | Introduction: Over recent years, task-oriented training has emerged as a dominant approach in neurorehabilitation. This article presents a novel, sensor-based system for independent task-oriented assessment and rehabilitation (SITAR) of the upper limb.Methods: The SITAR is an ecosystem of interactive devices including a touch and force–sensitive tabletop and a set of intelligent objects enabling functional interaction. In contrast to most existing sensor-based systems, SITAR provides natural training of visuomotor coordination through collocated visual and haptic workspaces alongside multimodal feedback, facilitating learning and its transfer to real tasks. We illustrate the possibilities offered by the SITAR for sensorimotor assessment and therapy through pilot assessment and usability studies.Results: The pilot data from the assessment study demonstrates how the system can be used to assess different aspects of upper limb reaching, pick-and-place and sensory tactile resolution tasks. The pilot usability study indicates that patients are able to train arm-reaching movements independently using the SITAR with minimal involvement of the therapist and that they were motivated to pursue the SITAR-based therapy.Conclusion: SITAR is a versatile, non-robotic tool that can be used to implement a range of therapeutic exercises and assessments for different types of patients, which is particularly well-suited for task-oriented training. |
Robotic prostheses: what do they actually mean for the patient?
Abstract | ||
 | Prostheses have undergone an accelerated development over the past few years, triggered by, amongst others, the conflicts in Iraq and Afghanistan. Indeed, with their share of wounded and amputees, these conflicts will undoubtedly have made a strong contribution to, putting the spotlight on this niche field of research. The technological sophistication of robotic prostheses gives free rein to the imagination. But what is the reality on the ground? As we speak more and more of the augmented man and body-machine fusion, what does this all actually mean for the patient? To shed some light on this matter, we put our questions to Nathanaël Jarrassé, a CNRS researcher at the Institute of Intelligent Systems and Robotics at the Pierre and Marie Curie University in Paris. |
Reachability and the sense of embodiment in amputees using prostheses
Abstract | ||
 | Amputated patients are hardly satisfied with upper limb prostheses, and tend to favour the use of their contralateral arm to partially compensate their disability. This may seem surprising in light of recent evidences that external objects (rubber hand or tool) can easily be embodied, namely incorporated in the body representation. We investigated both implicit body representations (by evaluating the peripersonal space using a reachability judgement task) and the quality of bodily integration of the patient’s prosthesis (assessed via questionnaires). As expected, the patients estimated that they could reach further while wearing their prosthesis, showing an embodiment of their prosthesis in their judgement. Yet, the real reaching space was found to be smaller with their prosthesis than with their healthy limb, showing a large error between reachability judgement and actual capacity. An overestimation was also found on the healthy side (comparatively to healthy subjects) suggesting a bilateral modification of body representation in amputated patients. Finally, a correlation was found between the quality of integration of the prosthesis and the way the body representation changed. This study therefore illustrates the multifaceted nature of the phenomenon of prosthesis integration, which involves its incorporation as a tool, but also various specific subjective aspects. |
Modifying upper-limb inter-joint coordination in healthy subjects by training with a robotic exoskeleton
Abstract | ||
 | The possibility to modify the usually pathological patterns of coordination of the upper-limb in stroke survivors remains a central issue and an open question for neurorehabilitation. Despite robot-led physical training could potentially improve the motor recovery of hemiparetic patients, most of the state-of-the-art studies addressing motor control learning, with artificial virtual force fields, only focused on the end-effector kinematic adaptation, by using planar devices. Clearly, an interesting aspect of studying 3D movements with a robotic exoskeleton, is the possibility to investigate the way the human central nervous system deals with the natural upper-limb redundancy for common activities like pointing or tracking tasks. |
Spectral parameters for Finger tapping quantification
Abstract | ||
 | A miniature inertial sensor placed on fingertip of index finger while performing finger tapping test can be used for an objective quantification of finger tapping motion. Temporal and spatial parameters such as cadence, tapping duration, and tapping angle can be extracted for detailed analysis. However, the mentioned parameters, although intuitive and simple to interpret, do not always provide all the necessary information regarding the subject’s motor performance. Analysis of frequency content of the finger tapping movement can provide crucial information about the patient's condition. In this paper, we present parameters extracted from spectral analysis that we found to be significant for finger tapping assessment. With these parameters, tapping’s intra-variability, movement smoothness and anomalies that may occur within the tapping performance can be detected and described, providing significant information for further diagnostics and monitoring progress of the disease or response to therapy. |
2016
Upper-Limb Robotic Exoskeletons for Neurorehabilitation: A Review on Control Strategies
Abstract | ||
 | Since the late 90s, there has been a burst of research on robotic devices for post-stroke rehabilitation. Robot-mediated therapy produced improvements on recovery of motor capacity; however, so far, the use of robots has not shown qualitative benefit over classical therapist-led training session, performed on the same quantity of movements. Multi degrees of freedom robots, like the modern upper-limb exoskeletons, enables a distributed interaction on the whole assisted limb and can exploit a large amount of sensory feedback data, potentially providing new capabilities within standard rehabilitation sessions. Surprisingly, most publications in the field of exoskeletons focused only on mechatronic design of the devices while little details were given to the control aspects. On the contrary, we do believe a paramount aspect for robots potentiality lays on the control side. Therefore the aim of this paper is to provide a taxonomy of currently available control strategies for exoskeletons for neurorehabilitation, in order to formulate appropriate questions towards the development of innovative and improved control strategies. |
Phantom hand and wrist movements in upper limb amputees are slow but naturally controlled movements
Abstract | ||
 | After limb amputation, patients often wake up with a vivid perception of the presence of the missing limb, called ''phantom limb''. Phantom limbs have mostly been studied with respect to pain sensation. But patients can experience many other phantom sensations, including voluntary movements. The goal of the present study was to quantify phantom movement kinematics and relate these to intact limb kinematics and to the time elapsed since amputation. Six upper arm and two forearm amputees with various delays since amputation (6months to 32years) performed phantom finger, hand and wrist movements at self-chosen comfortable velocities. The kinematics of the phantom movements was indirectly obtained via the intact limb that synchronously mimicked the phantom limb movements, using a Cyberglove for measuring finger movements and an inertial measurement unit for wrist movements. Results show that the execution of phantom movements is perceived as ''natural'' but effortful. The types of phantom movements that can be performed are variable between the patients but they could all perform thumb flexion/extension and global hand opening/closure. Finger extension movements appeared to be 24% faster than finger flexion movements. Neither the number of types of phantom movements that can be executed nor the kinematic characteristics were related to the elapsed time since amputation, highlighting the persistence of post-amputation neural adaptation. We hypothesize that the perceived slowness of phantom movements is related to altered proprioceptive feedback that cannot be recalibrated by lack of visual feedback during phantom movement execution. |
2015
Robotic Prosthetics : Moving Beyond Technical Performance. (A study of socio-anthropological and cultural phenomena influencing the appropriation of technical objects interacting with the body)
Abstract | ||
 | While physical interaction with robots is becoming common in many domains, numerous devices are not appropriated by their users and remain unused in the cupboard. This phenomenon is particularly observed with robotic devices which interact closely with the body, especially if they are designed to compensate for a loss of sensory or motor capacity. This article uses the quite extreme example of prosthetics to highlight the socio-anthropological and cultural phenomena affecting the appropriation and use of technical objects which interact with the body as much as (or even more than) their technical performance. Considering these complementary points of views and theories in the design of such devices could be a way of improving their appropriation. |
2014
Robotic exoskeletons: a perspective for the rehabilitation of arm coordination in stroke patients
Abstract | ||
 | Upper-limb impairment after stroke is caused by weakness, loss of individual joint control, spasticity, and abnormal synergies. Upper-limb movement frequently involves abnormal, stereotyped, and fixed synergies, likely related to the increased use of sub-cortical networks following the stroke. The flexible coordination of the shoulder and elbow joints is also disrupted. New methods for motor learning, based on the stimulation of activity-dependent neural plasticity have been developed. These include robots that can adaptively assist active movements and generate many movement repetitions. However, most of these robots only control the movement of the hand in space. The aim of the present text is to analyze the potential of robotic exoskeletons to specifically rehabilitate joint motion and particularly inter-joint coordination. First, a review of studies on upper-limb coordination in stroke patients is presented and the potential for recovery of coordination is examined. Second, issues relating to the mechanical design of exoskeletons and the transmission of constraints between the robotic and human limbs are discussed. The third section considers the development of different methods to control exoskeletons: existing rehabilitation devices and approaches to the control and rehabilitation of joint coordinations are then reviewed, along with preliminary clinical results available. Finally, perspectives and future strategies for the design of control mechanisms for rehabilitation exoskeletons are discussed. |
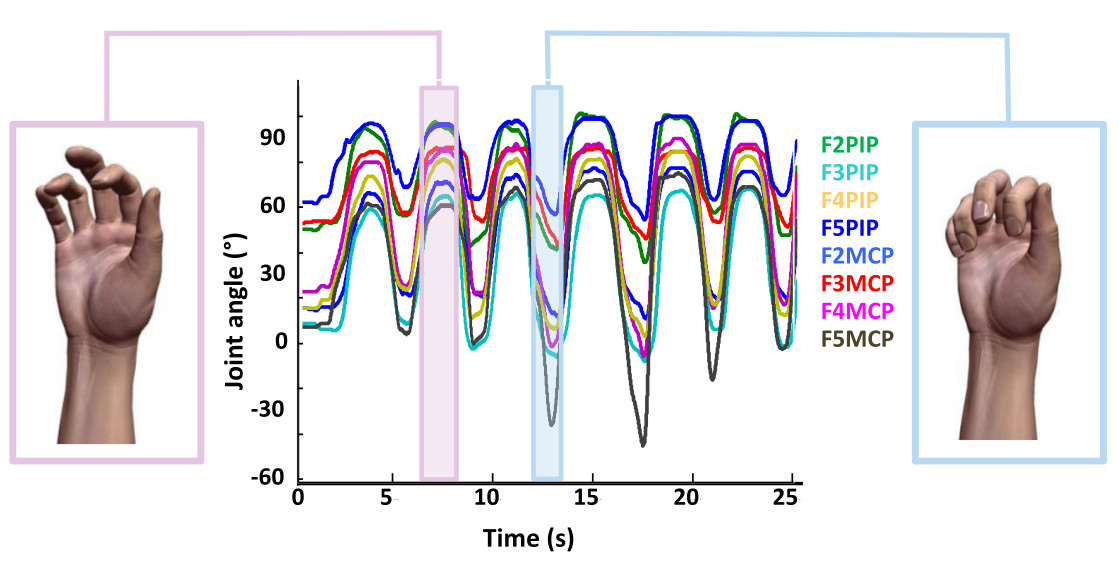
Analysis of hand synergies in healthy subjects during bimanual manipulation of various objects
Abstract | ||
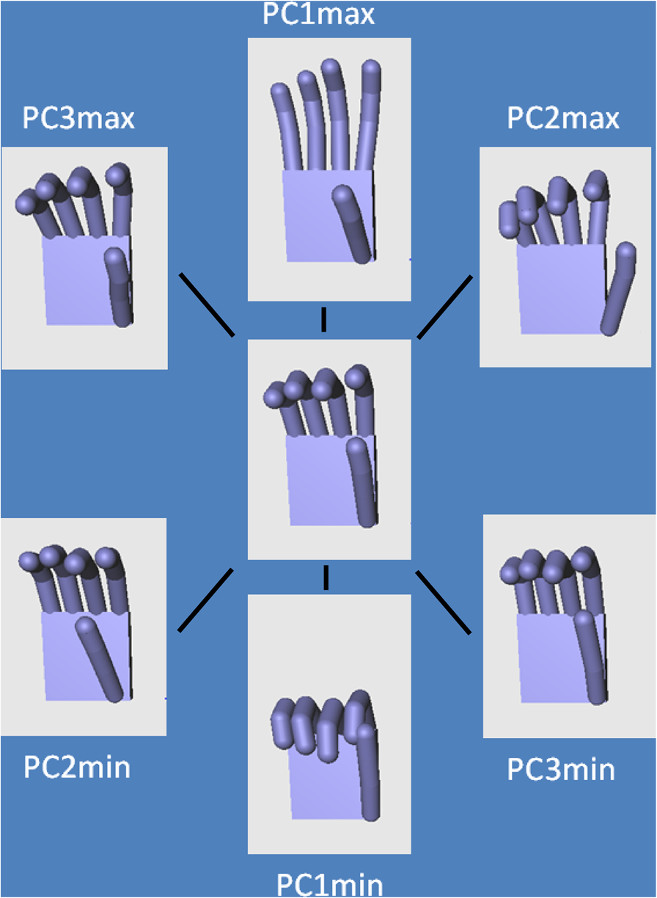 | BACKGROUND: Hand synergies have been extensively studied over the last few decades. Objectives of such research are numerous. In neuroscience, the aim is to improve the understanding of motor control and its ability to reduce the control dimensionality. In applied research fields like robotics the aim is to build biomimetic hand structures, or in prosthetics to design more performant underactuated replacement hands. Nevertheless, most of the synergy schemes identified to this day have been obtained from grasping experiments performed with one single (generally dominant) hand to objects placed in a given position and orientation in space. Aiming at identifying more generic synergies, we conducted similar experiments on postural synergy identification during bimanual manipulation of various objects in order to avoid the factors due to the extrinsic spatial position of the objects. METHODS: Ten healthy naive subjects were asked to perform a selected "grasp-give-receive" task with both hands using 9 objects. Subjects were wearing Cyberglove Ⓒ on both hands, allowing a measurement of the joint posture (15 degrees of freedom) of each hand. Postural synergies were then evaluated through Principal Component Analysis (PCA). Matches between the identified Principal Components and the human hand joints were analyzed thanks to the correlation matrix. Finally, statistical analysis was performed on the data in order to evaluate the effect of some specific variables on the hand synergies: object shape, hand side (i.e., laterality) and role (giving or receiving hand). RESULTS: Results on PCs are consistent with previous literature showing that a few principal components might be sufficient to describe a large variety of different grasps. Nevertheless some simple and strong correlations between PCs and clearly identified sets of hand joints were obtained in this study. In addition, these groupings of DoF corresponds to well-defined anatomo-functional finger joints according to muscle groups. Moreover, despite our protocol encouraging symmetric grasping, some right-left side differences were observed. CONCLUSION: The set of identified synergies presented here should be more representative of hand synergies in general since they are based on both hands motion. Preliminary results, that should be deepened, also highlight the influence of hand dominance and side. Thanks to their strong correlation with anatomo-functional joints, these synergies could therefore be used to design underactuated robotics hands. |
Ergonomic Design of a Wrist Robot: the Influence of Hyperstaticity on Reaction connecting Forces and Motor Strategies
Abstract | ||
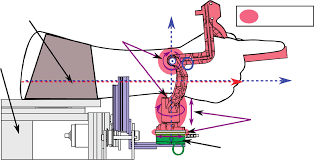 | Purpose: The purpose of this paper is to propose a method to avoid hyperstaticity and eventually reduce the magnitude of undesired force/torques. The authors also study the influence of hyperstaticity on human motor control during a redundant task. Design/methodology/approach: Increasing the level of transparency of robotic interfaces is critical to haptic investigations and applications. This issue is particularly important to robotic structures that mimic the human counterpart's morphology and attach directly to the limb. Problems arise for complex joints such as the wrist, which cannot be accurately matched with a traditional mechanical joint. In such cases, mechanical differences between human and robotic joint cause hyperstaticity (i.e. over-constrained) which, coupled with kinematic misalignment, leads to uncontrolled force/torque at the joint. This paper focusses on the prono-supination (PS) degree of freedom of the forearm. The overall force and torque in the wrist PS rotation is quantified by means of a wrist robot. Findings: A practical solution to avoid hyperstaticity and reduce the level of undesired force/torque in the wrist is presented. This technique is shown to reduce 75 percent of the force and 68 percent of the torque. It is also shown an over-constrained mechanism could alter human motor strategies. Practical implications: The presented solution could be taken into account in the early phase of design of robots. It could also be applied to modify the fixation points of commercial robots in order to reduce the magnitude of reaction forces and avoid changes in motor strategy during the robotic therapy. Originality/value: In this paper for the first time the authors study the effect of hyperstaticity on both reaction forces and human motor strategies. |
Slaves no longer: review on role assignment for human-robot joint motor action
Abstract | ||
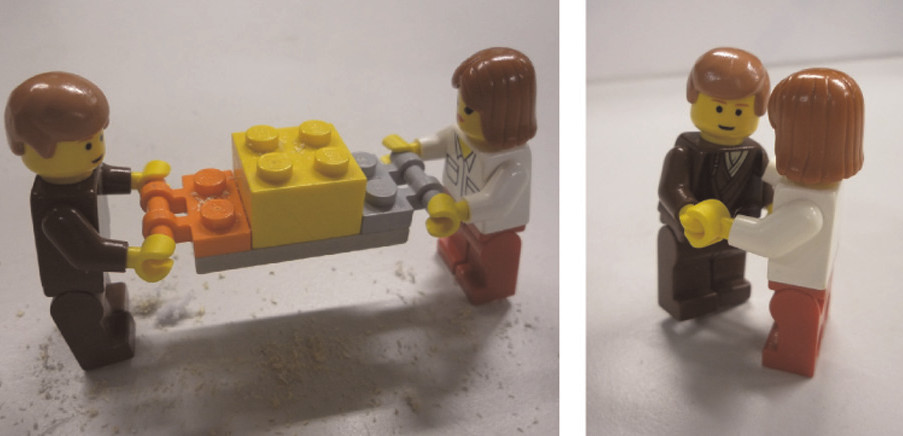 | This paper summarizes findings on the growing field of role assignment policies for human–robot motor interaction. This topic has been investigated by researchers in the psychological theory of joint action, in human intention detection, force control, human–human physical interaction, as well as roboticists interested in developing robots with capabilities for efficient motor interaction with humans. Our goal is to promote fruitful interaction between these distinct communities by: (i) examining the role assignment policies for human–robot joint motor action in experimental psychology and robotics studies; and (ii) informing researchers in human–human interaction on existing work in the robotic field. After an overview of roles assignment in current robotic assistants, this paper examines key results about shared control between a robot and a human performing interactive motor tasks. Research on motor interaction between two humans has inspired recent developments that may extend the use of robots to applications requiring continuous mechanical interaction with humans. |
2013
A Framework to Describe, Analyze and Generate Interactive Motor Behaviors
Abstract | ||
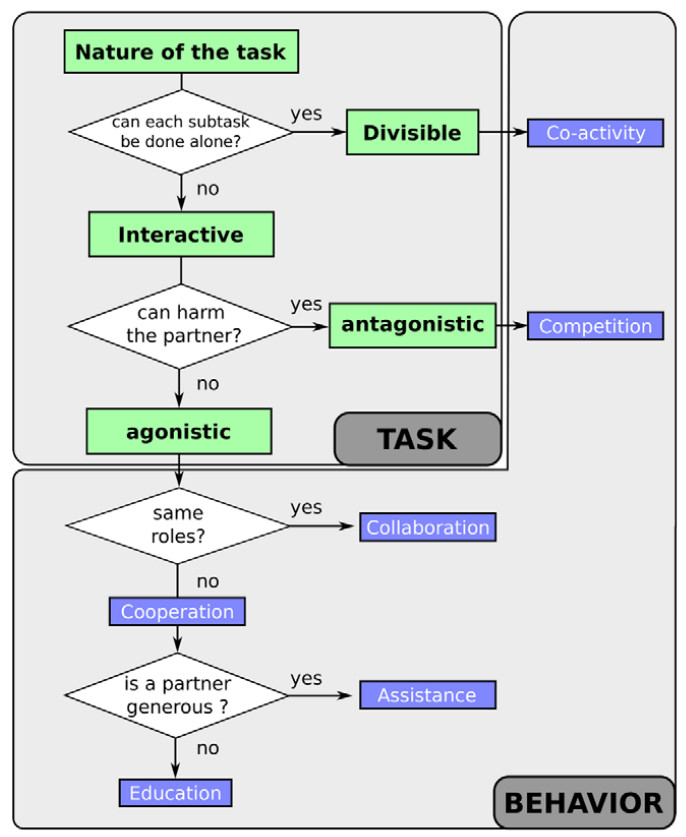 | While motor interaction between a robot and a human, or between humans, has important implications for society as well as promising applications, little research has been devoted to its investigation. In particular, it is important to understand the different ways two agents can interact and generate suitable interactive behaviors. Towards this end, this paper introduces a framework for the description and implementation of interactive behaviors of two agents performing a joint motor task. A taxonomy of interactive behaviors is introduced, which can classify tasks and cost functions that represent the way each agent interacts. The role of an agent interacting during a motor task can be directly explained from the cost function this agent is minimizing and the task constraints. The novel framework is used to interpret and classify previous works on human-robot motor interaction. Its implementation power is demonstrated by simulating representative interactions of two humans. It also enables us to interpret and explain the role distribution and switching between roles when performing joint motor tasks. |
2012
Abstract | ||
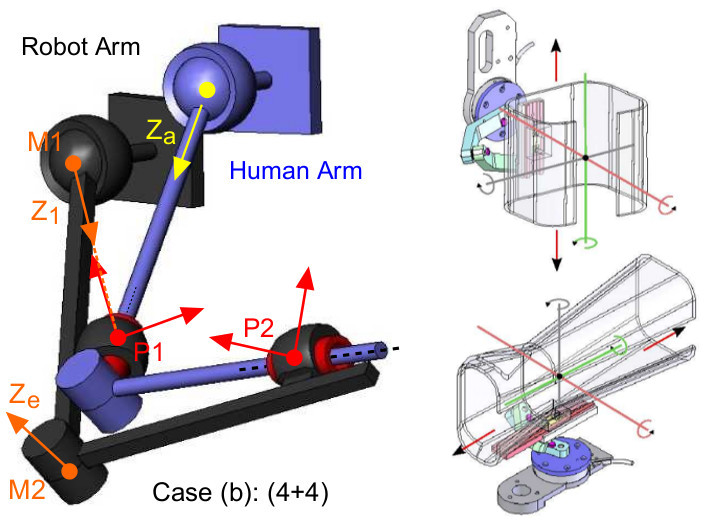 | When developing robotic exoskeletons, the design of physical connections between the device and the human limb to which it is connected is a crucial problem. Indeed, using an embedment at each connection point leads to uncontrollable forces at the interaction port, induced by hyperstaticity. In practice, these forces may be large because in general the human limb kinematics and the exoskeleton kinematics differ. To cope with hyperstaticity, the literature suggests the addition of passive mechanisms inside the mechanism loops. However, empirical solutions that are proposed so far lack proper analysis and generality. In this paper, we study the general problem of connecting two similar kinematic chains through multiple passive mechanisms. We derive a constructive method that allows the determination of all the possible distributions of freed degrees of freedom across different fixation mechanisms. It also provides formal proofs of global isostaticity. Practical usefulness is illustrated through two examples with conclusive experimental results: a preliminary study made on a manikin with an arm exoskeleton controlling the movement (passive mode) and a larger campaign on ten healthy subjects performing pointing tasks with a transparent robot (active mode). |
2010
A methodology to quantify alterations in human upper limb movement during co-manipulation with an exoskeleton
Abstract | ||
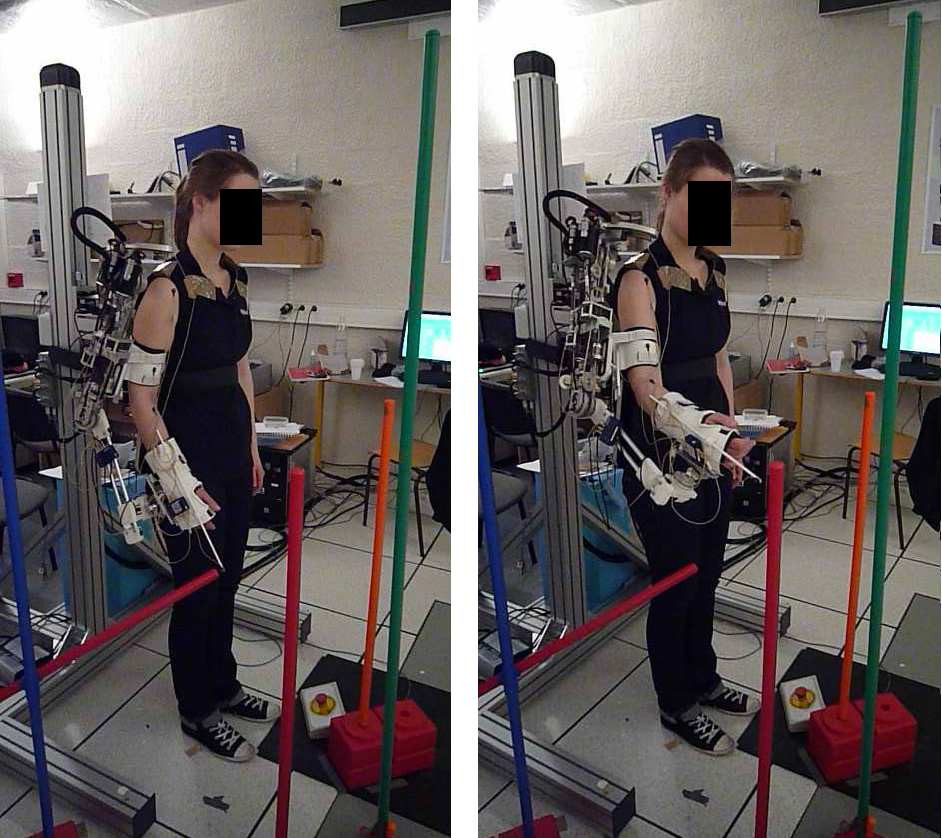 | While a large number of robotic exoskeletons have been designed by research teams for rehabilitation, it remains rather difficult to analyse their ability to finely interact with a human limb: no performance indicators or general methodology to characterize this capacity really exist. This is particularly regretful at a time when robotics are becoming a recognized rehabilitation method and when complex problems such as 3-D movement rehabilitation and joint rotation coordination are being addressed. The aim of this paper is to propose a general methodology to evaluate, through a reduced set of simple indicators, the ability of an exoskeleton to interact finely and in a controlled way with a human. The method involves measurement and recording of positions and forces during 3-D point to point tasks. It is applied to a 4 degrees-of-freedom limb exoskeleton by way of example. |
Rehabilitation robots: a compliment to virtual reality.
AbstractThe aim of this paper is to discuss the use of robots for upper limb rehabilitation following strokes in adults. We describe the main robots currently being developed and the results of clinical studies that have been carried out. The association of virtual reality interfaces and the robotic rehabilitation programs providing therapy in the form of games with a view to helping therapists increase the duration of rehabilitation exercise. |
2009
La conception d'un robot de reeducation au membre superieur
2007
De l'utilisation des robots pour la rééducation: intérêt et perspectives
AbstractLe but de ce texte est de présenter et discuter l’apport de la robotique pour la rééducation du membre supérieur, en particulier chez les patients hémiparétiques à la suite d’un accident vasculaire cérébral. La première partie présente les principes généraux qui guident le développement de ces robots, en particulier pour l’interaction mécanique entre le robot et le contrôle moteur humain. La seconde partie présente les principaux robots effectivement utilisés en rééducation avec leurs évaluations cliniques. Les robots permettent de faciliter l’initiation des gestes, la répétition de gestes de qualité, et un meilleur contrôle de la récupération des synergies. Ils autorisent aussi une quantification des gestes et une évaluation objective. Il est donc probable que leur place sera de plus en plus grande lorsque l’on désire un entraînement intensif, bien que leur apport ne soit pas encore cliniquement prouvé. L’aspect qualitatif devrait certainement progresser à l’avenir avec les progrès de la recherche dans le domaine de la robotique et une meilleure compréhension des mécanismes de l’interaction sensorimotrice avec les robots et de l’apprentissage pendant la rééducation. La prise en charge précoce des patients que semblent pouvoir permettre les robots est aussi un point intéressant, même si très peu d’éléments cliniques sur cette question sont actuellement disponibles. |
Peer-reviewed book chapters
2025
Corps technologisés, maîtrise humaine.
Abstract | ||
 | Alors que les performances sportives du corps humain touchent à leurs limites, il semble que leur dépassement ne pourra se faire qu’à l’aide d’ajouts techniques (semelles en carbone, combinaisons micro-nervurées, utilisation de capteurs et de data-science, etc.), faisant craindre la perte de la part humaine du sport. Cette présentation propose de renverser la perspective et de montrer qu’au contraire, tous ces artefacts ne pourront être performants qu’en lien avec une maîtrise accrue de l’humain sur son corps même hybridé, comme l’illustrent les capacités de personnes en situation de handicap appareillées. Or ce processus demeure difficile à percevoir par le grand public, en raison du poids de représentations collectives biaisées reposant sur la fascination pour la technologie et la croyance en la primauté de la toute-puissance de l’artefact sur les capacités humaines. En vue de relativiser, voire déconstruire, ces représentations, nous établirons un parallèle entre la perception courante des personnes en situation de handicap appareillées, et celle, trop fantasmée, des sportifs équipés de prothèses techniques. |
2021
Cyborg et corps artificiel
Abstract | ||
 | Nous vivons une période intense de développements technologiques et d’avancées des pratiques médicales, qui bouleversent la perception que nous avons de notre corps, et des possibilités d’interaction, de réparation, de fusion voire de remplacement de ce dernier par la technologie. L'imaginaire très fort du « corps hybride », sur-représenté dans nos sociétés occidentales témoigne de ce phénomène. Un grand nombre de productions culturelles (films, animations, jeux vidéos, etc.) entretiennent le mythe du cyborg, et du corps artificiel, voire à terme de la disparition du corps. A ces fictions s'ajoute aussi un discours idéologique et politique, très médiatisé, d'un certain nombre de groupes transhumanistesi et post-humanistes qui prône, de façon parfois simpliste, une fusion du corps et de la machine, en s'autorisant toutes les projections futuristes possibles, au détriment parfois, de la réalité scientifique et d'une réflexion éthique et sociétale pourtant fondamentale. Ce mythe de l’hybridation, aux yeux du grand public, est aussi légitimé et rendu tangible par la surmédiatisation de figures enjolivées d’êtres hybrides inclassables comme par exemple Aimee Mullins, bi-amputée de jambes devenue un mannequin célèbre, ou Oscar Pistorius, coureur bi-amputé de jambes, connu (initialement) pour ses performances et sa volonté de concourir contre des sportifs validesii (voir Figure 1). Cette diffusion d’images valorisantes d’êtres hybrides, c’est à dire de fusions corps-machines abouties et efficace, bien éloignées de la réalité de patients « ordinaire » amputés ou atteints d’un handicap sensoriel ou moteur, renforce la croyance en un mythe de l’homme réparé – si tant est que cela soit possible – et prépare la surenchère du mythe de l’homme augmenté et d’une fusion sans limite du corps et de la machine. Face à ces envahissantes mythologies et agitations idéologiques, l'objectif de cet article est donc de tenter, de définir la réalité de la « fusion homme-machine » et d'analyser quelques uns des mécanismes idéologiques qui participent à la fabrication de ce mythe. |
2020
L’ambivalence de l’enchantement prothétique contemporain
Abstract | ||
 | En 2009, Aimée Mullins, double amputée tibiale, sportive handisport et actrice-mannequin, intervenait lors d’une conférence TED talk 58 disponible sur internet et depuis visionnée par des millions de personnes. Entourée de ses douze prothèses esthétiques exposées en arrière-plan, elle déclarait que : « dorénavant, on ne parle pas de surmonter des désavantages, mais on discute plutôt de surpassement. On discute de potentiel sous-jacent. La fonction de la prothèse n’est plus uniquement de remplacer un membre perdu. La prothèse symbolise la liberté qu’a le porteur de créer sa propre réalité »... |
2019
AbstractCet article propose une définition générique des exosquelettes ainsi qu’une vision structurée des recherches sur ces dispositifs, pour permettre au lecteur de comprendre la technologie et les limites de ces dispositifs, leur grande diversité et les nombreuses difficultés associées à leur développement. L’article s’attache donc à construire une taxonomie permettant de structurer le domaine et de classer les différents dispositifs selon leurs caractéristiques mécaniques et de contrôle, pour ensuite dresser un état de l’art des quatre grands types de dispositifs (assistance, suppléance, rééducation et téléopération), et enfin conclure sur les nombreux challenges et perspectives du domaine. |
2018
Wearable robotic systems and their application for neurorehabilitation.
AbstractWearable systems open new perspectives for rehabilitation in individuals with disabilities who have difficulty in walking or making arm movements since they could be used to facilitate independent training in the clinic or at home. The field of wearable system is very wide and includes complex rigid exoskeleton structures for the assistance to joints or limbs and hybrid, soft, and interactive systems. However, the existing solutions are still little evaluated in the clinics. The aim of this chapter is to review the scientific challenges and the current developments of wearable systems and to discuss their potential for neurorehabilitation. |
2017
Versatile Interaction Control and Haptic Identification in Humans and Robots
Abstract | ||
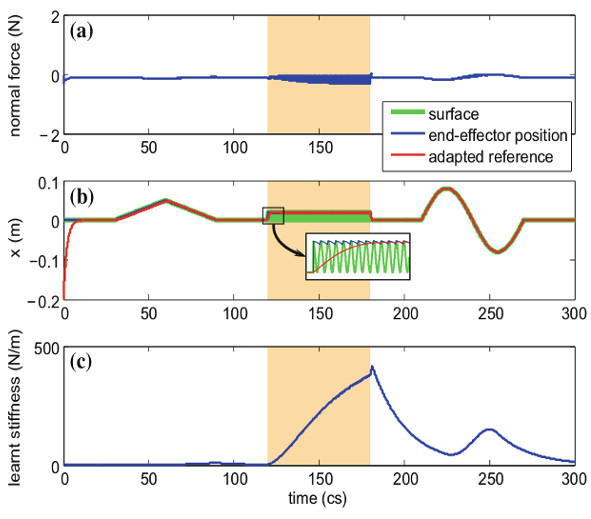 | Traditional industrial robot controllers are typically dedicated to a specific task, while humans always interact with new objects yielding unknown interaction forces and instability. In this chapter, we examine the neuromechanics of such contact tasks. We develop a model of the necessary adaptation of force, mechanical impedance and planned trajectory for stable and efficient interaction with rigid or compliant surfaces of different structures. Simulations demonstrate that this model can be used as a novel adaptive robot controller yielding versatile control in representative interactive tasks such as cutting, drilling and haptic exploration, where the robot acquires a model of the geometry and structure of the surface along which it is moving. |
Membres et organes artificiels: le mythe et la fabrique des surhommes
Abstract | ||
 | Depuis plusieurs décennies, s’est instaurée « une nouvelle ère » pour le corps, caractérisée par une évolution des pratiques médicales, mais aussi et surtout par le développement de nouvelles utopies. Face aux envahissantes mythologies et agitations idéologiques, l’objectif de cet article est donc de tenter de définir la réalité du « surhomme » d’aujourd’hui et d’analyser quelques-uns des mécanismes idéologiques qui participent à la fabrication de ce mythe. |
Prothèses robotiques : vers un nouveau dualisme?
2015

2010
Rehabilitation robots: a compliment to virtual reality.
AbstractThe aim of this paper is to discuss the use of robots for upper limb rehabilitation following strokes in adults. We describe the main robots currently being developed and the results of clinical studies that have been carried out. The association of virtual reality interfaces and the robotic rehabilitation programs providing therapy in the form of games with a view to helping therapists increase the duration of rehabilitation exercise. |
Peer-reviewed conference articles
2025
Assessing Inter-Joint Coordination in CrossFit: A Pilot Study Comparing Advanced and Beginner Practitioners
Persistent Changes in Upper-Limb Coordination Following Repetitive Exoskeleton Use
Grip force regulation when lifting an object with a robotic exoskeleton
Teleoperating a 6 DoF Robotic Manipulator from Head Movements
AbstractThis article presents an interactive control approach allowing a human user to teleoperate a robotic manipulator located nearby. With this approach, the user keeps his/her hands free, as only head movements are exploited to control the robot. The controller maps the 6 Degrees of Freedom (DoF) user's head position and orientation into the 6 DoF robot endeffector position and orientation. The robot can reach a large workspace thanks to the combination of two features. Firstly, a virtual wand between the user's head and the robot end-effector converts user's head pantilt rotations into large displacements of the robot end-effector center perpendicularly to the wand axis (2 DoF). Secondly, for the remaining 4 DoF (robot end-effector center displacement along the wand axis and robot en-effector orientation), realtime deformation of the virtual wand is triggered when the user reaches uncomfortable configurations due to his/her head workspace limitations. Additionally, the user gets, through an Augmented Reality (AR) Headset, a non-delayed visual feedback of the current virtual wand geometry and location. The paper includes a description of the setup and the proposed controller, detailing how the robot position/orientation is coupled to the user's head position/orientation. A set of elementary experiments with a constant-geometry wand is first presented, showing workspace limitations for some DoF. Then the wand reconfiguration is introduced in the experiments, leading to full control of 6 DoF manipulation tasks throughout a large workspace. |
A Comparative Study Between a Virtual Wand and a One-to-One Approach for the Teleoperation of a Nearby Robotic Manipulator
AbstractThe prevailing and most effective approach to teleoperate a robotic arm involves a direct position-to-position mapping, imposing robotic end-effector movements that mirrors those of the user, Fig. 1-top. However, due to this oneto-one mapping, the robot's motions are limited by the user's capability, particularly in translation. Drawing inspiration from head pointers utilized in the 1980s, originally designed to enable drawing with limited head motions for tetraplegic individuals, we proposed a "virtual wand" mapping which could be used by participants with reduced mobility. This mapping employs a virtual rigid linkage between the hand and the robot's endeffector, Fig. 1-bottom. With this approach, rotations produce amplified translations through a lever arm, creating a "rotationto-position" coupling and expanding the translation workspace at the expense of a reduced rotation space. In this study, we compare the virtual wand approach to the one-to-one position mapping through the realization of 6-DoF reaching tasks. Results indicate that the two different mappings perform comparably well, are equally well-received by users, and exhibit similar motor control behaviors. Nevertheless, the virtual wand mapping is anticipated to outperform in tasks characterized by large translations and minimal effector rotations, whereas direct mapping is expected to demonstrate advantages in large rotations with minimal translations. These results pave the way for new interactions and interfaces, particularly in disability assistance utilizing residual body movements (instead of hands) as control input. Leveraging body parts with substantial rotations could enable the accomplishment of tasks previously deemed infeasible with standard direct coupling interfaces. |
2024
Identifying individual characteristics influencing post-adaptation of motor behavior in upper-limb exoskeleton users
AbstractOver the past decade, industrial ergonomics have made significant advances, leading to the development of various occupational exoskeletons. While beneficial, exoskeletons could disrupt motor control due to their distributed interaction with the human body. This study explores individual factors influencing different adaptation patterns following exoskeleton use in asymptomatic individuals. Fifty-five participants used a 4 Degree of Freedom (DoF) arm exoskeleton to perform reaching tasks under low-magnitude force fields. Pre-and post-exposure movements were recorded via motion capture, and personal characteristics were documented. Spectral clustering identified variations in inter-joint coordination after exposition to the exoskeleton, and a random forest classifier linked these patterns to individual anthropometric, demographic and kinematic traits. The model highlighted factors such as laterality, forearm length, and some spontaneous kinematics metrics as key predictors of post-adaptation behavior. These findings underscore the need to consider individual profiles to minimize disruptive motor adaptations and improve exoskeleton safe widespread in industrial applications. |
Hands-free teleoperation of a nearby manipulator through a virtual body-to-robot link
AbstractThis paper introduces an innovative control approach for teleoperating a robot in close proximity to a human operator, which could be useful to control robots embedded on wheelchairs. The method entails establishing a virtual connection between a specific body part and the robot's end-effector, visually displayed through an Augmented Reality (AR) headset. This linkage enables the transformation of body rotations into amplified effector translations, extending the robot's workspace beyond the capabilities of direct one-to-one mapping. Moreover, the linkage can be reconfigured using a joystick, resulting in a hybrid position/velocity control mode using the body/joystick motions respectively. After providing a comprehensive overview of the control methodology, we present the results of an experimental campaign designed to elucidate the advantages and drawbacks of our approach compared to the conventional joystick-based teleoperation method. The body-link control demonstrates slightly faster task completion and is naturally preferred over joystick velocity control, albeit being more physically demanding for tasks with a large range. The hybrid mode, where participants could simultaneously utilize both modes, emerges as a compromise, combining the intuitiveness of the body mode with the extensive task range of the velocity mode. Finally, we provide preliminary observations on potential assistive applications using head motions, especially for operators with limited range of motion in their bodies |
Assessment of Multi Vibrotactile-Skin Stretch (MuViSS) Haptic Device to restore sensory feedback in upper limb amputees using prosthetics
AbstractThis study explores the MuViSS (Multi Vibrotactile -Skin Stretch) haptic device designed to enhance cognitive processes and behavior through sensory feedback in upper limb prosthetics. The device employs feedback that combines the stretching of the skin in conjunction with proprioception and cue alerts upon contact. Our previous work involving nine nondisabled participants wearing the MuViSS and controlling a modified prosthetic hand demonstrated its efficacy compared to traditional vibration force feedback and a no-haptic condition. Preliminary experiments with an amputated participant have been performed to further support the efficacy of MuViSS in providing valuable sensory feedback. Positive results from these preliminary experiments confirm the potential of the MuViSS device and its feedback strategy to improve control and user experience in the field of upper-limb prosthetics. |
Perception of paired vibrotactile stimulus on the upper limb: implications for the design of wearable technology
AbstractThe ability to correctly perceive multiple stimuli represents an important barrier to the use of vibrotactile devices in training complex behaviors. The aim of this study was to evaluate how stimulation parameters influence perception of vibrotactile patterns applied to the forearm and upper arm. In this experimental protocol, participants (N= 16) were asked to compare two vibrotactile sequences and indicate whether they were the same or different. We examined the effects of (1) sequential versus simultaneous vibrotactile stimulation;(2) the temporal structure of the vibrotactile stimulus upon subject perception and (3) difference in pattern recognition between the two segments. Our results confirmed that perception was generally superior when the two stimuli were presented sequentially and when there was a marked difference in the temporal structure of the signals. At the same time, participants were highly capable of detecting two identical sequences when presented simultaneously. These findings may have important implications for the design of wearable vibrotactile devices intended for guiding upper limb movement. |
Short term after-effects of small force fields applied by an upper-limb exoskeleton on inter-joint coordination
AbstractExoskeleton technologies have numerous potential applications, ranging from improving human motor skills to aiding individuals in their daily activities. While exoskeletons are increasingly viewed, for example, as promising tools in industrial ergonomics, the effect of using them on human motor control, particularly on inter-joint coordination, remains relatively uncharted. This paper investigates the effects of generic low-amplitude force fields applied by an exoskeleton on motor strategies in asymptomatic users. The force fields mimic common perturbations encountered in exoskeletons, such as residual friction, over/under-tuned assistance, or structural elasticity. Fifty-five participants performed reaching tasks while connected to an arm exoskeleton, experiencing one of five tested force fields. Their movements before and after exposure to the exoskeleton force field were compared. The study focuses both on spatial and temporal changes in coordination using specific metrics. The results reveal that even brief exposure to a low-amplitude force field, or to uncompensated residual friction and dynamic forces, applied at the joint level can alter the inter-joint coordination, while task performance remains unaffected. The tested force fields induced varying degrees of changes in joint contributions and synchronization. This study highlights the importance of monitoring coordination changes to fully understand the impact of exoskeletons on human motor control and thus enable safe and widespread adoption of those devices. |
Comparing Teaching Strategies of a Machine Learning-based Prosthetic Arm
AbstractPattern-recognition-based arm prostheses rely on recognizing muscle activation to trigger movements. The effectiveness of this approach depends not only on the performance of the machine learner but also on the user’s understanding of its recognition capabilities, allowing them to adapt and work around recognition failures. We investigate how different model training strategies to select gesture classes and record respective muscle contractions impact model accuracy and user comprehension. We report on a lab experiment where participants performed hand gestures to train a classifier under three conditions: (1) the system cues gesture classes randomly (control), (2) the user selects gesture classes (teacher-led), (3) the system queries gesture classes based on their separability (learner-led). After training, we compare the models’ accuracy and test participants’ predictive understanding of the prosthesis’ behavior. We found that teacher-led and learner-led strategies yield faster and greater performance increases, respectively. Combining two evaluation methods, we found that participants developed a more accurate mental model when the system queried the least separable gesture class (learner-led). Our results conclude that, in the context of machine learning-based myoelectric prosthesis control, guiding the user to focus on class separability during training can improve recognition performances and support users’ mental models about the system’s behavior. We discuss our results in light of several research fields : myoelectric prosthesis control, motor learning, human-robot interaction, and interactive machine teaching. |
Interactive Systems for Healthcare at ISIR
2023
Does a small perturbation created by an upper-limb exoskeleton impact our coordination in reaching tasks ?
AbstractThis study explores the impact of joint-level perturbations on coordination strategies during a reaching task, focusing on the motor learning process associated with such perturbations. While prior research has extensively investigated perturbations applied at the human end-effector level, joint-level perturbations have received limited attention. Given the redundancy of human limbs, joint-level perturbations may not necessarily affect the task, leading to potential differences in how the central nervous system adapts. In this experiment involving 55 subjects, participants performed reaching movements both with and without an exoskeleton applying various force fields (Transparent, Elastic, Viscous, Increase, or Decrease of Gravity). Movement kinematic data collected before and after exoskeleton exposure were compared. The findings indicate that, even when end-effector performance remains constant, coordination strategies often undergo significant changes. Notably, the viscous force field predominantly affects joint contributions, while the Elastic force field mainly influences the temporal organization of joints. Remarkably, over half of the subjects exposed to the transparent condition altered their coordination strategy. This research underscores the importance of monitoring coordination changes to gain a comprehensive understanding of how exoskeletons impact human motor control, facilitating their safe and widespread adoption. |
A Practical Control Approach for Safe Collaborative Supernumerary Robotic Arms
AbstractSupernumerary robotic arms have a high potential to increase human capacities to perform complicated tasks; e.g., having a third arm could increase the user's strength, precision, reachability, and versatility. However, having a robotic manipulator working in extreme proximity to the user raises new challenges in terms of safety; i.e., uncontrolled and hazardous collisions with the user's body parts and the environment. In this preliminary work, we show that most of these safety considerations can be extracted from standardized norms and translated into kinematics constraints for the robot. Thus, we propose a quadratic programming approach to achieve safe inverse-kinematics and physical interaction for supernumerary arms. We validate our approach in designing a safe supernumerary arm using the 7-Dof Kinova Gen3 robot. |
"Drôle d'objet" ou "drôle de comportement ?"
2022
Using Arm Swing Movements to Maintain the Walking State in a Self-Balanced Lower-Limb Exoskeleton
AbstractThis work investigates how arm swing movements measured by Inertial Motion Unit (IMU) sensors can be used to identify and maintain the walking state in a self-balanced lower-limb exoskeleton for medical use. When an exoskeleton is in a dynamical state during gait, short patterns in IMU signals (e.g. a braking movement) can be hard to extract. Therefore, by relying on a threshold-based classifier constructed upon descriptive features of actively maintained arm swing movements, it is possible to build a gait termination detection method in which the transition between the walking and standstill states occurs whenever arm movements cease, and the corresponding patterns in the IMU signals disappear. Analysis of arm IMU signals were used to identify three amplitude and coordination-based features for the classification architecture. An online implementation of this novel detection interface for maintaining the walking state was validated with 11 unimpaired participants using the Atalante exoskeleton, leading to high accuracy with less than 2% of false negatives when the arms were swinging at a high amplitude, and less than 15% when they were swinging at a medium amplitude. |
Improved real-time gait phase detection using simple force sensors, sequencing conditions and smart fault management
AbstractGait event analysis by wearable devices is still a current challenge. Ground foot contacts, lower body segment accelerations or rotations or joint kinematics are commonly used, associated with functional analysis or machine learning algorithms, and currently allow to detect up to 5 different phases during a gait cycle. However, these detection are not always reliable or usable in real time because of calculation duration or sensor faults and drifts. To get more precise and realistic sequencing of the gait cycle, we chose to only use the information of heel or toe contacts with Force Sensing Resistors (FSR - used as foot switches) to decompose the cycle in 8 different phases that we determined previously by a bottom-up analysis of the possible contacts during walk. Based on this definition different detection algorithms are presented, which introduces sequencing conditions and smart fault management of sensors information to improve the performance and robustness of the detection. Proposed algorithms are assessed on the recorded walking data of 12 participants and in an online experiment, showing an average of 99% recognition rate of gait phases during the walk. These proposed approaches could offer new possibilities for using simple and low-cost instrumented soles to perform quantitative assessment of walking strategies. |
2021
Computing the positioning error of an upper-arm robotic prosthesis from the observation of its wearer's posture
AbstractWhen the arm prosthesis worn by an amputated Human being is not adequately configured with respect to the end-effector task, it body compensations are often observed. Namely, to compensate for a wrong joint positioning on the robotic distal side, a subject trying to reach a desired position/orientation of his/her hand mobilizes his/her proximal joints, thus exploiting the redundancy of the human+robot kinematic chain. In this paper, we explore the possibility of exploiting this well-known behavior to reverse the causality: if we observe the posture of an amputated subject wearing a prosthesis during a hand positioning task, to what extent can we infer the positioning error of the prosthesis? To answer this question, we make the assumption that the adequate, or natural posture for a given task is one that optimizes a postural score. The proposed approach then consists in i) measuring the joint posture of the subject fitted with the prosthesis; ii) search for an alternative posture that optimizes a postural score within the null space of the human+robot kinematic chain and iii) compute the position error for the robot joints between the initial and the optimized posture. An experimental evaluation is provided with non amputated subjects who emulate erratic positioning of their distal joints during hand positioning tasks. Results show that joint errors are estimated with a precision that seems compatible with the implementation of a real time control algorithm. |
Intent-aware control in kinematically redundant systems: Towards collaborative wearable robots
AbstractMany human-robot collaboration scenarios can be seen as a redundant leader-follower setup where the human (i.e., the leader) can potentially perform the task without the assistance of the robot (i.e., the follower). Thus, the goal of the collaboration, beside stable execution of the task, is to reduce the human cost; e.g., ergonomic, or cognitive cost. Such system redundancies (where the same task be achieved in different manner) can also be exploited as a communication channel for the human to convey his/her intention to the robot; since it is essential for the overall performance (both execution and assistance) that the follower recognizes the intended task in an online fashion. Having an estimation for the intended task, the robot can assist the human by reducing the human cost over the task null-space; i.e., the null-space which arises from the overall system redundancies with respect to the intended task. With the prospective of supernumerary and prosthetic robots, in this work, we primarily focus on serial manipulation in which the proximal/distal part of the kinematic chain is controlled by the leader/follower respectively. By exploiting kinematic redundancies for intention-recognition and costminimization, our proposed control strategy (for the follower) ensures assistance under stable execution of the task. Our results (simulations and preliminary experimentation) show the efficacy of our method in providing a seamless robotic assistance (i.e., improving human posture) toward human intended tasks (i.e., reaching motions) for wearable robotics. |
Caractérisation de l'effondrement durant la marche des patients atteints de myosite à inclusions
AbstractLa myosite à inclusions (IBM - Inclusion Body Myositis) est une maladie rare entraı̂nant une dégénérescence progressive des muscles. L’atteinte des quadriceps est souvent la première manifestation de la maladie, amenuisant la capacité des personnes atteintes à se tenir debout et entraînant rapidement des problèmes de chutes récurrentes, lors de la marche notamment. Ces atteintes, bilatérales mais asymétriques, conduisent d’abord à un affaiblissement progressif d’une seule jambe. Une particularité des chutes qu’il génère est qu’elles ne résultent pas d’une perte d’équilibre mais plutôt d’une perte de soutien qui entraı̂ne un effondrement vertical sur soi-même. Bien qu’il existe des solutions orthétiques et exosquelettiques pour assister la marche (notamment en fournissant une assistance physique à la mobilité), il n’existe à l’heure actuelle pas de dispositif spécifiquement dédié à la prévention de la chute qui puisse améliorer la sécurité et le confort de ces personnes dans leur vie quotidienne. Afin de développer une telle assistance, une meilleure compréhension des mécanismes et de la dynamique de ces effondrements semble donc nécessaire, afin de pouvoir être en mesure de les détecter et les anticiper au plus tôt. Dans cette étude, nous avons développé un dispositif wearable d’enregistrement de la cinématique d’une jambe et des appuis au sol et l’avons utilisé afin de collecter des données de personnes asymptomatiques mimant des effondrements caractéristiques de la pathologie IBM durant la marche. Les données enregistrées de la cinématique du genou et de la temporalité des appuis au sol ont ensuite étés analysées afin de caractériser cet effondrement au regard d’une marche asymptomatique. Cette analyse préliminaire nous a permis d’observer et de caractériser trois types d’effondrements spécifiques. Ces premières résultats constituent une première étape pour développer des algorithmes de détection exploitant un nombre réduite de capteurs embarqués, qui pourraient être utilisés pour piloter une assistance robotique de rattrapage de la chute. |
2020
AbstractWith their advanced mechatronics, myoelectric upper-limb prostheses now have many motion possibilities. Yet, the latter are not fully employed because of the inconvenient control and prostheses wearers often use their device as a rigid tool while achieving hand positioning and orientation with compensatory movements. In this paper, we propose to take advantage of this natural human behaviour to control prosthesis motions: the user is in charge of the end-effector while the devices role is to correct the human posture when necessary. We here apply this concept to control a prosthetic wrist pronosupination. A Rolyan clothespin test performed by two transradial amputees shows that the proposed control is as efficient as myoelectric control while requiring no learning. |
A closed-loop and ergonomic control for prosthetic wrist rotation
AbstractBeyond the ultimate goal of prosthetics, repairing all the capabilities of amputees, the development line of upper-limb prostheses control mainly relies on three aspects: the robustness, the intuitiveness and the reduction of mental fatigue. Many complex structures and algorithms are proposed but no one question a common open-loop nature, where the user is the one in charge of correcting errors. Yet, closing the control loop at the prosthetic level may help to improve the three main lines of research cited above. One major issue to build a closed-loop control is the definition of a eliable error signal; this paper proposes to use body compensations, naturally exhibited by prostheses users when the motion of their device is inaccurate, as such. The described control scheme measures these compensatory movements and makes the prosthesis move in order to bring back the user into an ergonomic posture. The function of the prosthesis is no longer to perform a given motion but rather to correct the posture of its user while s/he focus on performing an endpoint task. This concept was validated and compared to a standard open-loop scheme, for the control of a prosthetic wrist, with five healthy subjects completing a dedicated task with a customized transradial prosthesis. Results show that the presented closed-loop control allows for more intuitiveness and less mental burden without enhancing body compensation. |
2019
Providing proprioceptive feedback by means of vibrotactile stimuli: A way to improve body integration of a prosthetic arm
An optimized visual biofeedback to train users in using prosthesis with pattern recognition myoelectric control
AbstractNext generation prosthetics will rely massively on myoelectric "Pattern Recognition" (PR) based control approaches, as proposed with the Ottobock Myo Plus system. Those uses multiple recording electrodes and complex machine learning algorithms to recognize multiple muscle activation patterns and increase user dexterity. One major factor of successful functioning of these approaches lies in the training of amputated users and in their understanding of how those works. We thus propose here an intuitive visual biofeedback which can be easily used to train amputated subjects and allow them to learn to adapt and modulate their muscular contractions to improve their control performance. An experimental campaign was conducted on 8 healthy subjects and 1 transradial amputee, fitted with a 8 channel myoelectric recording system. Their performance in controlling an interface through a myoelectric PR algorithm were evaluated; before and after a short (3 minutes) automatic user training session consisting in using the proposed visual biofeedback for one group, and using a generic PR algorithm output feedback for the control group. The objective was to train the most problematic gesture. Differences in the variations of performance before and after this user's training sessions are then analysed to evaluate the potential of the proposed approach. Participants trained with the proposed biofeedback increased their classification score for the retrained gesture by 27%, with an improvement of the after-training average global successful classification rate of 8.8% (final overall score of 93%). The control group obtained an increase of 49% for the retrained gesture, but with a global increase of 1.9% (final overall score of 75%). Analysis of the variations of the average myoelectric patterns (RMS values of the myoelectric activity across the channels) for the trained gesture before and after training indicates a clear change in contraction strategy only in the group who used the proposed biofeedback. The preliminary results obtained highlight the potential of this method which does not focus so much on over-optimizing the pattern recognition algorithm or on physically training the users than on providing them simple and intuitive information to adapt or even radically change their motor strategies to solve some misclassification issues. While future work should be focused on the experimental evaluation on more amputated users, we believe that such biofeedback could pave the road toward generic tools for prosthetists to train the amputees who will be fitted, in a near future, with the new generation of myoelectric pattern recognition controlled prostheses. |
Improving the control of prostheses in arm amputees with approaches based on motor coordination
AbstractRecent advances in mechatronics and robotics have led to the production of prostheses with a growing number of active degrees of freedom (DoFs). Unfortunately, the gap is growing between this improved hardware and their still counter-intuitive, sequential and limited myoelectric control. To overcome some of these control limitations, there is a renewal of interest in using movements rather than electrophysiological signals as control inputs. Among those movement-based control approaches, some aim to create a more intuitive and natural control by using the motion of the residual limb and body to predict and automatize partly the movement of the prosthesis. Such control rely on the use of models of natural interjoint coordination which naturally exists in healthy subjects. We thus here propose to use Radial Basis Function Networks (RBFN) to estimate flexion/extension prosthetic elbow movements from the residual shoulder angular movements, measured with embedded Inertial Measurement Units (IMUs). The performance of this control model was assessed with an experimental evaluation with 3 transhumeral amputated participants who used this automatically driven elbow prosthesis (and a generic myoelectric control for comparison) to perform reaching tasks. The automatic control mode relied on a generic model of the shoulder-elbow coordination which was built from data obtained from a group of healthy subjects. Several metrics were thus used to quantify the task performance, along with the movement strategies exhibited by the amputated participants to illustrate the possibilities and present limitations of such control approaches. |
Reciprocal Kinematic Control: Using Human-Robot Dual Adaptation to Control Upper Limb Assistive Devices
AbstractUpper limb (UL) assistive robots, such as exoskeletons, prostheses or supernumerary limbs, can rarely be fully autonomous devices. Indeed, it is generally not possible to use pre-defined patterns of motions because of the great diversity of tasks and the variety of UL movement strategies to achieve any of them. Control has to be provided to the users. For that purpose, the most widespread solutions to obtain user’s motor intention use physiological signals (electromyograms or electroencephalograms e.g.), distal functional joints (for instance, head or foot motions control the end-effector position and/or orientation) or inter-joint synergies models[5]. Despite interesting results, they all still have important limitations: the first two are neither natural nor intuitive and suffer from robustness issues, the third one does not allow very versatile devices. To tackle these issues, we propose a new control approach, together with a new paradigm, that uses the motion strategies naturally developed by the Central Nervous System (CNS). When a limb mobility is reduced, or when an assistive device does not work properly, CNS compensates and takes advantage of motor redundancy of the body: it calls other joints to still perform the desired gesture. Typical compensatory joints for UL movements are the trunk and the scapula. Our concept is to servo the robot to these body compensations. The only task of the latter is to make its user come back to a comfortable posture, and this indirectly leads to the realisation of the intended motion. The reciprocal adaptation between human and robot allows both to reduce the body compensations and perform UL movements with the assistive device. We validated a proof of concept of this paradigm on ten healthy subjects who executed a path-tracking task with an elbow exoskeleton. |
2018
Using the body kinematics to assess the utilization of transhumeral prostheses
AbstractThere is a gap between the technical capability of upper limb prostheses, and the control strategy (commonly sequential myoelectric control) used to actuate the motorized joints. Surprisingly, the control method is the same for prosthetic hands and hand/wrist/elbow systems, which leads to a complex utilization. Research groups are investigating new control strategies to make the prosthetic control easier. Most studies are focusing on the task achievement, but it is nonetheless essential to assess the achievement method, especially since high-level amputees are prone to develop compensation-related musculoskeletal disorders. The study aims to show that body kinematics can be used to compare different control strategies, or prosthetic equipments. |
Adaptation of upper limb movement using exoskeleton-based training and transfer of kinematic patterns to unconstrained movement: a preliminary study
AbstractRobotic technologies offer the possibility for highly specific training of upper limb movements. How exactly the motor coordination imposed during an intervention carries over into unconstrained upper limb activity, however, remains poorly understood. This preliminary study sought to examine the after effects of robotic training on upper limb joint kinematics during reaching. |
A simple movement based control approach to ease the control of a myoelectric elbow prosthetics in transhumeral amputees
AbstractCommon myoelectric control strategy remains complex to use and produce unnatural gestures since it does not allow simultaneous movements of several joints. This is especially an issue for the transhumeral amputees who can use an active elbow in addition to active prosthetic wrist and hand. Since most transhumeral amputees have a mobile residual limb, an interesting approach aims at utilizing this mobility to control the elbow. We thus developed a simple electronic device relying on an inertial measurement unit, that can be interfaced with existing commercial myoelectric elbows and which convert chosen displacements of the residual limb into control signals, offering an intuitive way of controlling an active elbow prosthesis whilst allowing a simultaneous myoelectric control of the wrist and hand. |
Adaptation to the absence of tactile and proprioceptive feedback in object handling
AbstractDextrous manipulation necessitates efficient sensorimotor feedback mechanisms to orientate handheld objects, adjust for movement dynamics and respond to perturbations. In particular, cutaneous receptors and proprioception are paramount in the regulation of hand-object interactions (Johansson, 1991; Nowak et al., 2004). This study further examined the object handling skills of a person with massive peripheral deafferentation (consequent to sensory neuropathy) in order to improve knowledge of how people adapt/compensate for the loss of tactile/proprioceptive feedback. |
2017
Control of prosthetics through EMG patterns associated to phantom limb voluntary gestures is possible in transhumeral amputees without surgical reinnervation
Using phantom limb voluntary gestures in transhumeral amputees to control prostheses
Phantom upper limb mobility: characteristics and evolution
Pre-clinical evaluation of a natural prosthetic elbow control strategy using residual limb motion and a model of healthy inter-joint coordinations
AbstractA gap has been growing between the mechanical features of newly commercialized prosthetic devices and the control strategies available to the users. The prosthetic joints are controlled sequentially via myoelectric control, and each actuation requires the user's attention. Because of a complex control scheme, transhumeral amputees are generally equipped with a 1-degree-of-freedom myoelectric hand, a myoelectric wrist rotator, and a manually locked elbow. The prosthetic forearm position, adjusted before the movement, is not involved in the overall upper limb movements, resulting in the development of compensatory strategies. A promising solution to improve prosthetic control utilizes the residual limb motions to control the elbow. Previous studies have shown that elbow motion could be predicted from measures of the residual limb movements and an inter-joint coordination model. This study is the first to report the utilization of an automatically driven prosthetic elbow by a transhumeral amputee. |
Grasping after trans-radial amputation: comparison of kinematics between amputated limb equipped with myo-electric prosthesis and healthy limb.
AbstractAfter upper limb amputation, myoelectric prosthesis does not allow total functional recovery: grasping is executed with compensation motions. The objective of this study is to compare grasping's kinematics between prosthetic and healthy upper limb for myoelectric trans-radial prosthesis users. |
Reconsidering phantom limb: potential applications for prosthesis control after above-elbow amputation
Pre-clinical assessment of an intuitive prosthetic elbow control strategy using residual limb motion with osseointegrated patients
AbstractMost transhumeral amputees deplore that their prosthesis lacks functionality due to control-related limitations. Externally powered prosthetic devices are commonly controlled via myoelectric control whereby biceps and triceps contractions drive sequentially the prosthetic joints. Because of a complex control scheme, transhumeral amputees are generally equipped with a 1-degree-of-freedom myoelectric hand, a myoelectric wrist rotator, and a manually locked elbow, despite the commercialization of more advanced devices. This results in the development of compensatory strategies to overcome the prosthesis’ lack of mobility. An alternative control strategy relates the residual limb motions to the prosthetic elbow motion using the natural coordination between shoulder and elbow observed in healthy movements. However, conventional external sockets tend to prevent the residual limb mobility, limiting the potentiality of this novel control strategy. Osseo-integration enables a stable attachment of the prosthetic device and frees the residual limb. This study focuses on the performance of three osseo-integrated patients using an automatically driven prosthesis. |
Voluntary phantom hand and finger movements in transhumeral amputees could be used to naturally control polydigital prostheses
Abstract | ||
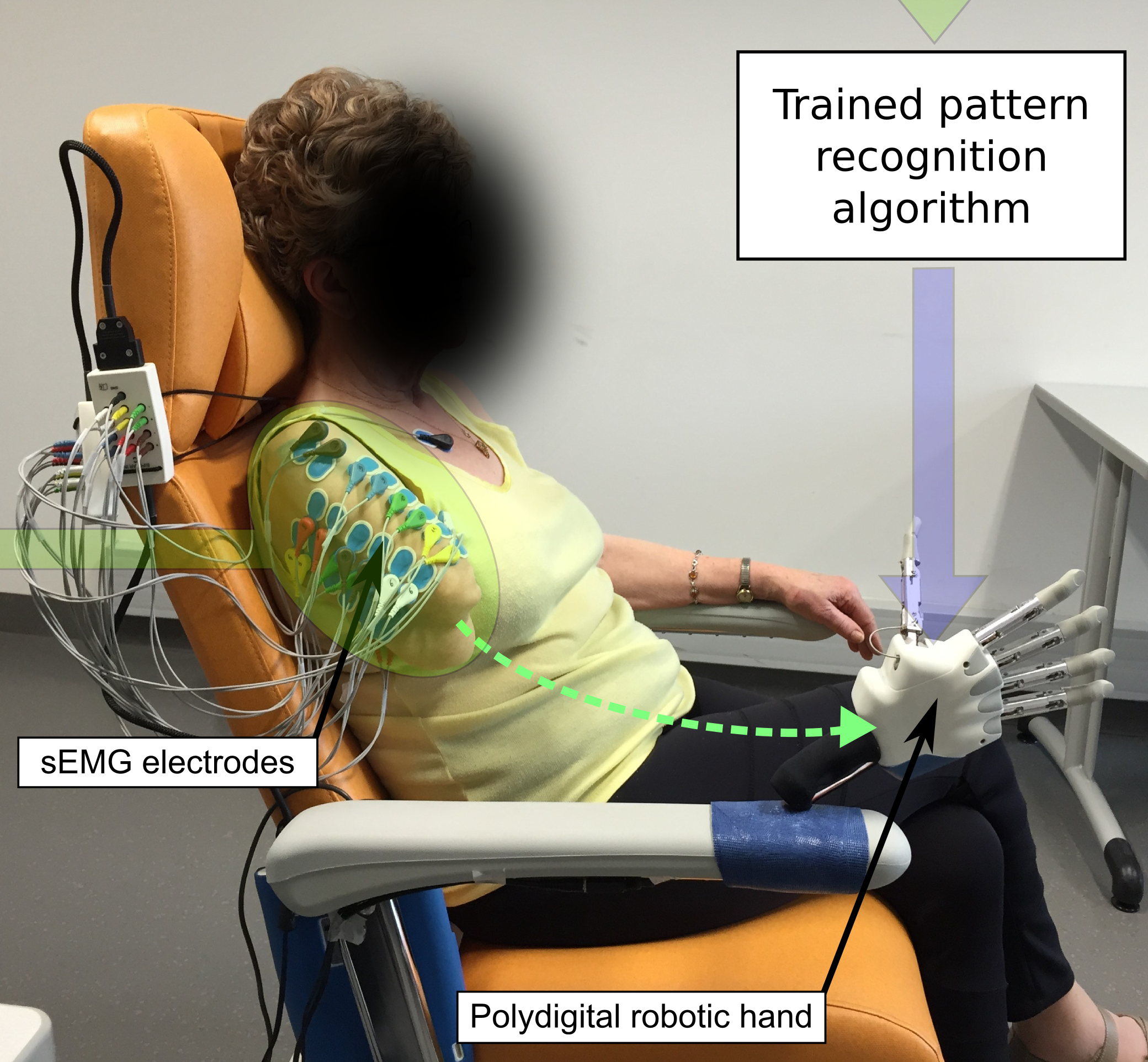 | An arm amputation is extremely invalidating since many of our daily tasks require bi-manual and precise control of hand movements. Perfect hand prostheses should therefore offer a natural, intuitive and cognitively simple control over their numerous biomimetic active degrees of freedom. While efficient polydigital prostheses are commercially available, their control remains complex to master and offers limited possibilities, especially for high amputation levels. In this pilot study, we demonstrate the possibility for upper-arm amputees to intuitively control a polydigital hand prosthesis by using surface myoelectric activities of residual limb muscles (sEMG) associated with phantom limb movements, even if these residual arm muscles on which the phantom activity is measured were not naturally associated with hand movements before amputation. Using pattern recognition methods, three arm amputees were able, without training, to initiate 5-8 movements of a robotic hand (including individual finger movements) by simply mobilizing their phantom limb while the robotic hand was mimicking the action in real time. This innovative control approach could offer to numerous upper-limb amputees an access to recent biomimetic prostheses with multiple controllable joints, without requiring surgery or complex training; and might deeply change the way the phantom limb is apprehended by both patients and clinicians. |
Comparison of different error signals driving the adaptation in assist-as-needed controllers for neurorehabilitation with an upper-limb robotic exoskeleton
Abstract | ||
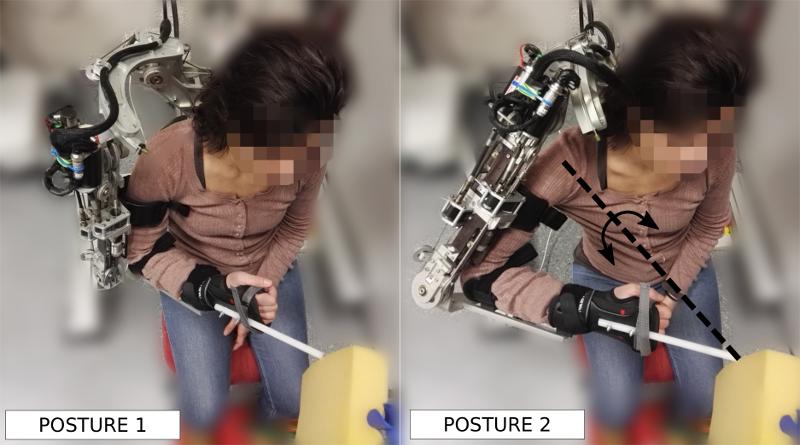 | Assist-as-needed control aims at maximizing stroke survivors involvement during robotic-led therapies of neurorehabilitation. Besides the specific characteristics of the designed adaptive control strategy, a fundamental property of this control architecture is the choice of the error signal which will drive the adaptation process. This driving source is a necessary control parameter to be chosen, although often sidelined in the control design, and several solutions already exist in the state-of-the-art. For this reason, we wanted to compare three different strategies to guide the adaptation, respectively based on the local joint performances, on the end-effector only behaviour, or on the performance of one specific joint in the kinematic chain of the robot. The resulting analysis evaluates the possibilities offered by simply changing from one source to another with respect to the specific stage of the motor recovery of the patients, potentially extending the capabilities of current exoskeleton controllers for neurorehabilitation. |
2016
Frequency analysis of repetitive finger tapping – extracting parameters for movement quantification
AbstractIn clinical practice, the finger tapping movement is often validated visually, thus resulting in a coarse diagnostic resolution. However, by using miniature inertial sensor mounted on fingertip of index finger, finger tapping performance can be quantified, allowing objective assessment of specific characteristics or changes in the finger tapping pattern over time. Various parameters such as cadence, tapping duration, speed, and tapping angle can be extracted for detailed analysis of patient’s motor performance. However, the listed parameters, although intuitive and simple to interpret, do not always carry all necessary information regarding subject’s motor performance. Here we present kinematic parameters extracted from spectral analysis that are significant for finger tapping assessment. With these parameters, tapping’s intravariability, movement smoothness and anomalies that occur within the tapping performance can be identified and observed, providing significant information for further diagnostics and monitoring progress of the disease of response to therapy. |
Intuitive control of a prosthetic elbow
Abstract | ||
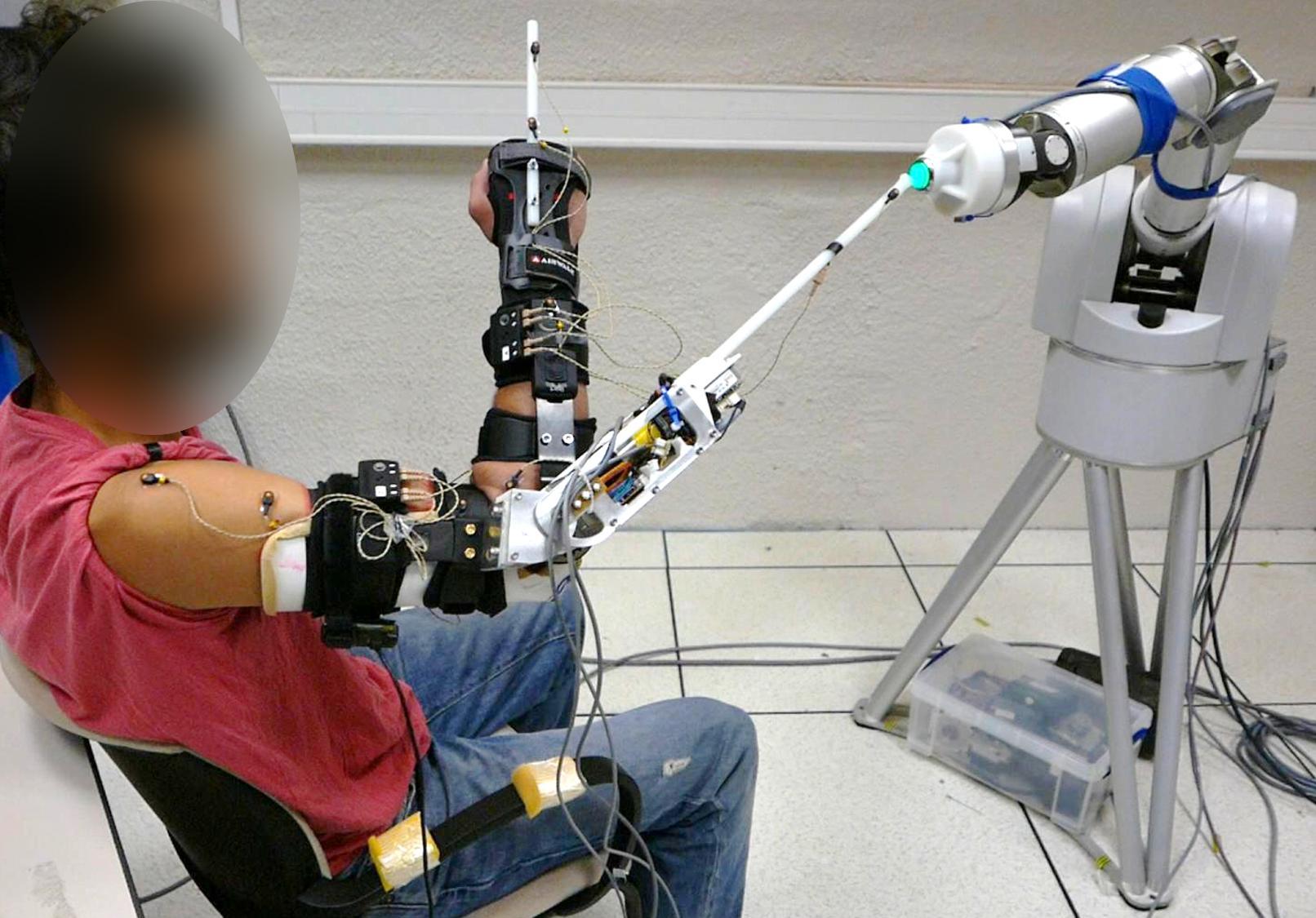 | Many transhumeral amputees deplore the lack of functionality of their prosthesis, mostly caused by a counter-intuitive control strategy. This work is the first implementation of an automatic prosthesis control approach based on natural coordinations between upper limb joints and IMU-based humeral orientation measurement. One healthy individual was able to use the prosthetic elbow, fitted with a prosthetic forearm and attached to the subject’s upper arm, to point at targets with an encouragingly small error. |
Intuitive prosthetic control using upper limb inter-joint coordinations and IMU-based shoulder angles measurement: a pilot study
Abstract | ||
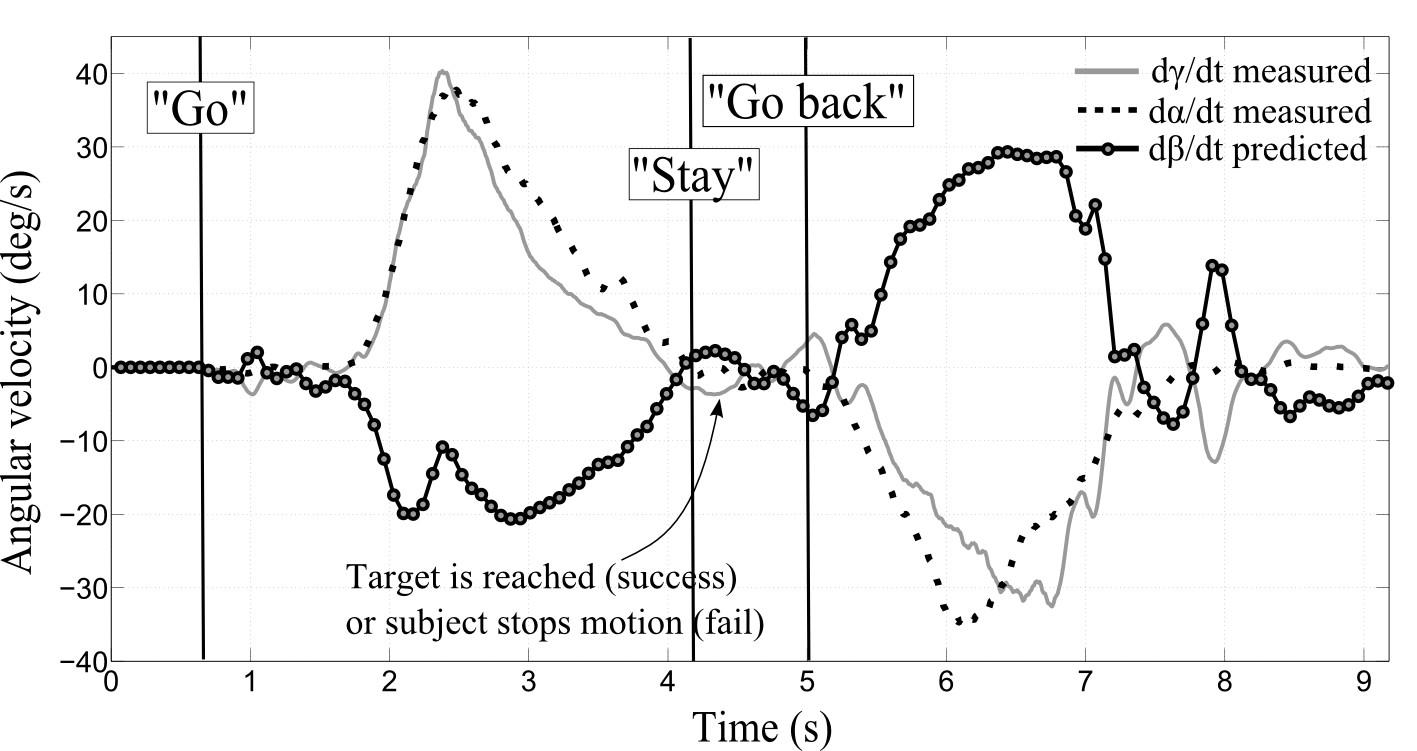 | Commercialized upper limb prostheses do not match the expectations of amputated people, especially transhumeral amputees. Most of them report a lack of functionality, mostly explained by a counter-intuitive control strategy. This paper presents the first implementation of an automatic prosthesis control approach based on natural coordinations between upper limb joints and IMU-based humeral orientation measurement. Two healthy individuals were able to use the prosthetic forearm attached to their upper arm to point at targets in a 3D workspace with a reasonable error. The results demonstrate the potential applications of automatizing the motion of some joints along the upper limb, in the same way as human upper limbs are controlled. |
Towards the implementation of natural prosthetic elbow motion using upper limb joint coordination
Abstract | ||
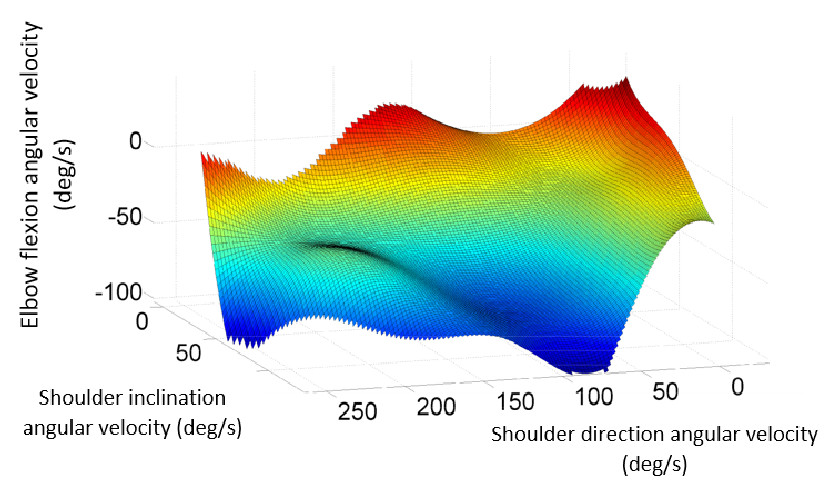 | The control of an active prosthetic elbow is problematic for most transhumeral amputees and a functional solution providing intuitive control over active multi-joint prosthetic upper limbs is yet to be found. The method in this paper uses IMU-based upper arm kinematics to predict the elbow motion based on upper limb joint coordinations during pointing movements. A RBFN-based regression was performed to model the shoulder/elbow coordination. The prediction results indicate that such an approach is ready to be implemented on current transhumeral prostheses equipped with embedded motion sensors like IMUs. Different algorithm training methods to obtain better prediction performance are also investigated. |
Learning motor coordination under resistive viscous force fields at the joint level with an upper-limb robotic exoskeleton
Abstract | ||
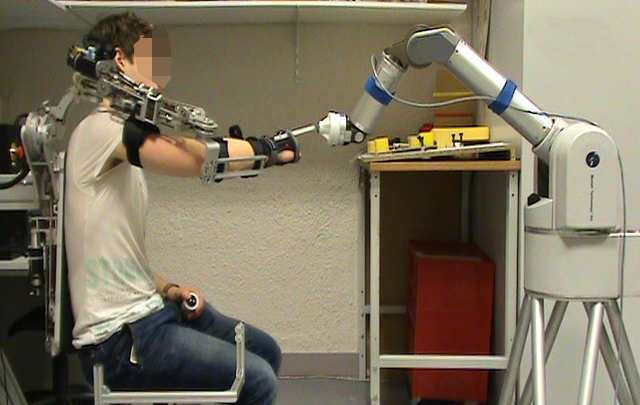 | In the field of rehabilitation robotics, few researchers have been focusing on the problem of controlling motor coordination in post-stroke patients. Studies on coordination learning, when the robotic devices act at the joint level on multiple interaction points, as in the case of exoskeletons, are lacking. For this reason, we studied on 10 healthy subjects the possibility of learning a non-natural inter-joint coordination while performing a pointing task. This coordination was induced by a 4-DOF robotic exoskeleton, applying resistive force fields at the joint level. Preliminary results showed the capability of our controller to modify human healthy natural coordination after exposition to the fields and generalization of these effects to movements which were never exposed to these constraints. |
2015
La personne amputée dans les médias : quand l'ambiguité des images bouleverse la compréhension du handicap et des technologies de compensation/restauration.
AbstractThis conference aims to highlight the equivocal and ambiguous way amputees wearing external prostheses are being staged in the media. Its purpose is to present a critical analysis of collective representations of prosthetic devices, especially through the paradigm of the cyborg which is becoming more and more present in the media imagination and imagery. How do these images permeate the public sphere and amputees themselves? Do they have a concrete impact on how amputees are perceived and perceive themselves? What are the main differences between what is shown and what is really experienced by patients? This presentation will focus on the way the vision conveyed by recent media has gradually shaked contemporary conceptions and representations of disability and disabled body. From the prosthetic devices' point of view, it has steadily drifted into the image of "bionic" body or "enhanced" body, even going so far as to influence the research field and technical innovation process. More broadly, we will show how the figure of the amputee wearing prosthesis questions in an iconic way the contemporary relation to the body and the new technologies (a gradual depreciation of the former, and an increasing fascination towards the latter). The authors work with patients as part of their research, so the data collection is partly done through interviews and ground observations. A critical analysis of the collective imagination and recent media trends will also be put into perspective, especially around the concept increasingly popular of "human enhancement" which is at the core of this representational twist and novel notion that is currently made of the prosthetic body and the concept of disability. |
Quantitative Assessment of Motor Deficit with an Intelligent Key Object: A Pilot Study
AbstractConventional assessment of sensorimotor functions is carried out using standard clinical scales which are subjective and insufficiently sensitive to changes in motor performance. Alternatively, sensor based systems offer a quantitative approach to motor assessment. We have designed a set of low cost, easy to use instrumented objects to assess a subject's performance during skilled tasks. In this pilot study we discuss the design of one object, the intelligent key, and describe how it can be used to assess a subject's performance during fine manipulation tasks using the proposed metrics and techniques. Three subjects with motor disability and one healthy subject participated in this study. Subjects performed insertion and rotation tasks that mimic the skills used in day to day key manipulation. A threshold detector algorithm based on Teager Energy Operator was applied to the object acceleration signal to quantify time spent struggling with the task and Spectral Arc Length was used to assess the smoothness of pronation/supination. Overall, the results indicate that increased difficulty in task performance correlates with decreased smoothness in task performance. |
Adaptive control of a robotic exoskeleton for neurorehabilitation
Abstract | ||
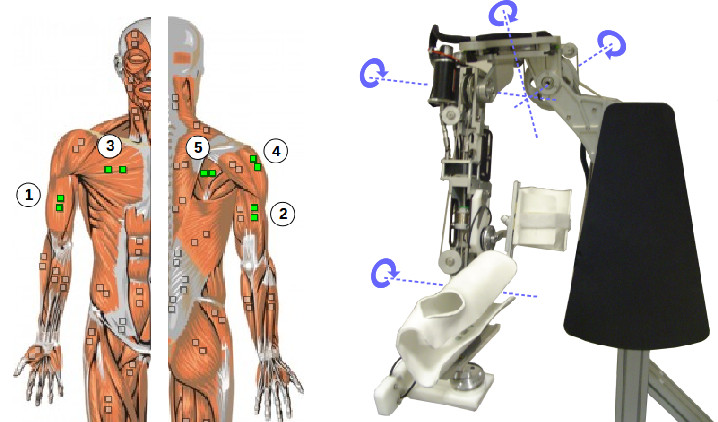 | Neurorehabilitation efficiency increases with therapy intensity and subject's involvement during physical exercises. Robotic exoskeletons could bring both features, if they could adapt the level of assistance to patient's motor capacities. To this aim, we developed an exoskeleton controller, based on adaptive techniques, that can actively modulate the stiffness of the robotic device in function of the subject's activity. We tested this control law on one healthy subject with an upper-limb exoskeleton. The experiment consisted in learning a trajectory imposed by the robot. The early results show the different features allowed by our controller with respect to controllers commonly used for neurorehabilitation with exoskeletons. |
2014
Neuromuscular reorganisation after arm amputation revealed by stump EMG evoked by different phantom movements.
Abstract | ||
| After amputation, the cortical regions of which the neuronal activity was related to the control of the missing limb will gradually be active in relation to another, generally adjacent, part of the body. This reorganization often goes together with a vivid perception of the presence of the missing limb, called “phantom limb”. A little known phenomenon, but experienced by many amputees, is that the phantom limb can be moved at will. The patients feel the movements to be made in correspondence with their will and they are able to copy with their intact limb the movement they “performed” with their phantom limb. Results of recent studies suggest that, despite the cortical reorganisation, M1 still can send motor commands to the missing limb. These motor commands, being unable to project on the missing limb muscles, project on the preserved muscles of the stump, resulting in specific muscle activation patterns. We will (1) show the large panel of phantom movements experienced by patients and (2) make a comparison between the EMG patterns evoked by phantom movements and those generated by the patients for the control of myoelectric prostheses. |
Étude épidémiologique des mouvements volontaires du membre fantome dans les suites d’une amputation majeure de membre supérieur
Exploration of phantom limb mobility in arm amputees
Effect of visual, tactile and proprioceptive sensory perturbations on grasp to lift tasks in healthy subjects.
AbstractThe present study uses an innovative instrumented object in order to analyse the effect of sensorimotor perturbations on several grasping tasks in healthy subjects. Our perspective is to develop a method in order to characterize the impairment of grasping and the compensatory strategies in patients with a stroke induced brain injury. |
Instrumented objects for the study and quantitative evaluation of grasping and manipulation strategies.
AbstractImpairment of grasping ability is very frequent in stroke survivors. However, despite the importance of this question and the numerous rehabilitation techniques dedicated to grasping, there still lacks comprehensive studies on grasping function and manipulation after stroke. In addition, there is also a lack of pertinent methods for the assessment of grasping function in hemiparetic patients; along with devices to evaluate patients’ motor performances in a simple way. We therefore developed a set of instrumented objects that can be grasped and manipulated by patients while wirelessly recording accelerations, orientations and forces applied over their surfaces. We present here the results obtained with one of this object (an instrumented rectangular box). An experimental protocol based on grasping/lifting and manipulation tasks was developed and run on a population of healthy subjects. Analysis was conducted on the data recorded, thanks to suitable developed metrics (timings analysis, force levels and repartition over the object, smoothness etc.). Results indicates that such simple instrumented object could be suitable to characterize sensorimotor impairments, which may help the understanding of grasping and manipulation strategies in hemiparetic patients and complement assessment using standard clinical scales. |
Toward the use of augmented auditory feedback for the rehabilitation of arm movements in stroke patients.
AbstractIntroduction.– Following stroke, patients frequently demonstrate loss of motor control and function and altered kinematics of reaching movements (decreased velocity, loss of smoothness and loss of inter-joint coordination). Recent clinical observations using rehabilitation technology suggest that active training may reduce impairment thanks to motor learning. One method to promote motor learning is movement sonification. In this framework, we are exploring the potential of augmented auditory feedback as a means to guide movement performance during training (Knowledge of Performance) and not, as is usually done, simply to signal the success of the trial (Knowledge of Results). Material and methods.– Sonification of arm movement can provide patients with auditory feedback relative to the ongoing direction of the movement, coordination between shoulder and elbow movement and/or motion smoothness. This implies the on line recording of the movement and quantifying of the related impairment in order to generate feedback which stimulates appropriate audio-motor coupling. Results.– We present a literature review of previous pilot studies of sonification for motor rehabilitation and our current exploration involving different types of sonification and musical metaphors usable in rehabilitation (including source-filters, concatenative/granular synthesis and physical model sound synthesis). Conclusion.– The perspective of sonification for rehabilitation will be discussed. |
2013
Rééducation robotisée : bases conceptuelles et neurophysiologiques.
Abstract- |
Analysis of grasping strategies and function in hemiparetic patients using an instrumented object
Abstract | ||
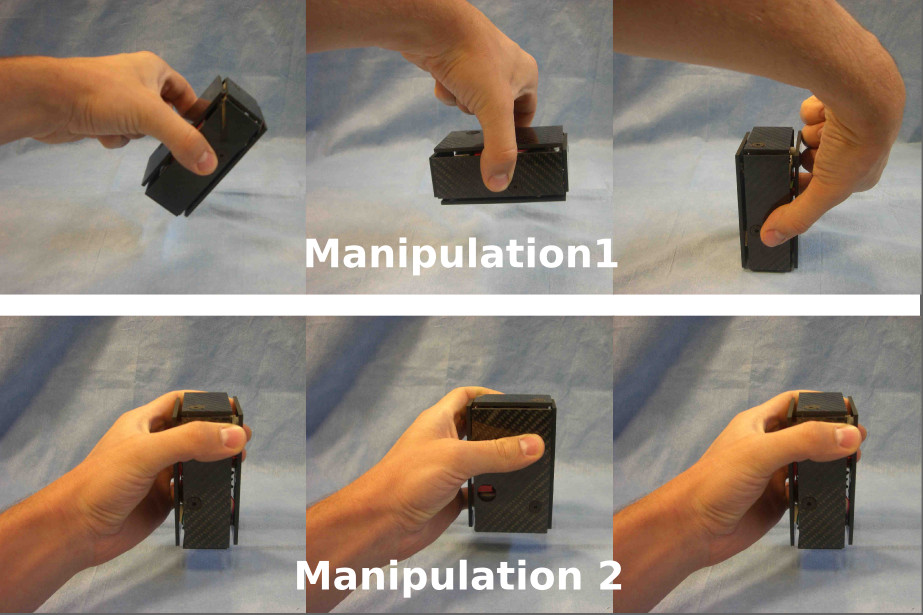 | This paper validates a novel instrumented object, the iBox, dedicated to the analysis of grasping and manipulation. This instrumented box can be grasped and manipulated, is fitted with an Inertial Measurement Unit (IMU) and can sense the force applied on each side and transmits measured force, acceleration and orientation data wirelessly in real time. The iBox also provides simple access to data for analysing human motor control features such as the coordination between grasping and lifting forces and complex manipulation patterns. A set of grasping and manipulation experiments was conducted with 6 hemiparetic patients and 5 healthy control subjects. Measures made of the forces, kinematics and dynamics are developed, which can be used to analyse grasping and contribute to assessment in patients. Quantitative measurements provided by the iBox reveal numerous characteristics of the grasping strategies and function in patients: variations in the completion time, changes in the force distribution on the object and grasping force levels, difficulties to adjust the level of applied forces to the task and to maintain it, along with movement smoothness decrease and pathological tremor. |
Hyperstaticity for Ergonomic Design of a Wrist Exoskeleton
Abstract | ||
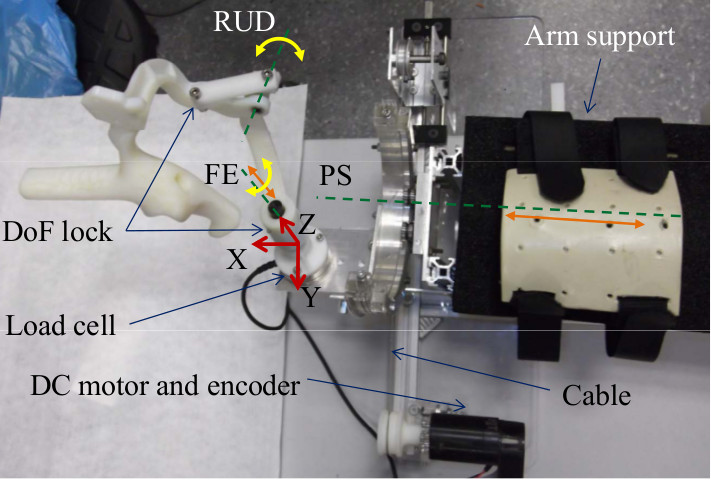 | Increasing the level of transparency in rehabilitation devices has been one of the main goals in robot-aided neurorehabilitation for the past two decades. This issue is particularly important to robotic structures that mimic the human counterpart's morphology and attach directly to the limb. Problems arise for complex joints such as the human wrist, which cannot be accurately matched with a traditional mechanical joint. In such cases, mechanical differences between human and robotic joint cause hyperstaticity (i.e. overconstraint) which, coupled with kinematic misalignments, leads to uncontrolled force/torque at the joint. This paper focuses on the prono-supination (PS) degree of freedom of the forearm. The overall force and torque in the wrist PS rotation is quantified by means of a wrist robot. A practical solution to avoid hyperstaticity and reduce the level of undesired force/torque in the wrist is presented, which is shown to reduce 75% of the force and 68% of the torque. |
2012
A method for measuring the upper limb motion and computing a compatible exoskeleton trajectory
Abstract | ||
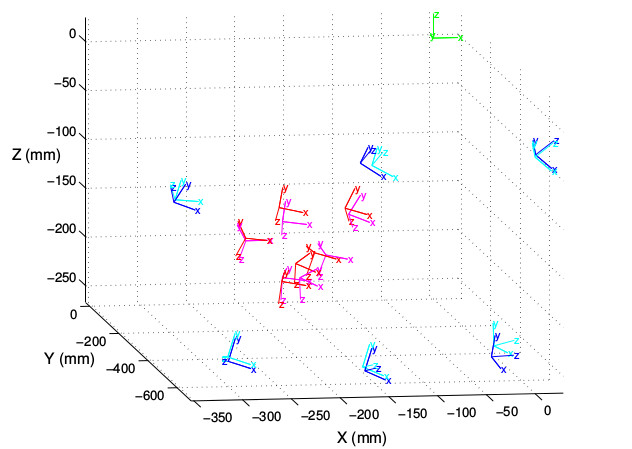 | This paper deals with the problem of computing trajectories for an exoskeleton that match a motion recorded on a given subject. Literature suggests that this problem can be solved by reconstructing the subject's joint motion using one of the numerous models available, and then feeding the exoskeleton with the joint trajectories. This is founded on the assumption that the exoskeleton kinematics reproduces the human kinematics. In practice, though, mismatches are unavoidable and lead to inaccuracies. We thus developed a method that is primarily based on an appropriate mechanical design: passive mechanisms are used to connect the exoskeleton with splints wore by the subject, in such a way that, within the workspace, there always exists a posture of the exoskeleton compatible with a given position and orientation of the splints. The trajectory computing method, by itself, consists of recording the position and orientation of the splints thanks to a conventional 3D motion tracker and to exploit standard robotics tools in order to compute an exoskeleton posture compatible with the measured human posture. Conclusive experimental results involving an existing 4 DoF upper-limb exoskeleton are shown. |
A Versatile Biomimetic Controller for Contact Tooling and Tactile Exploration
Abstract | ||
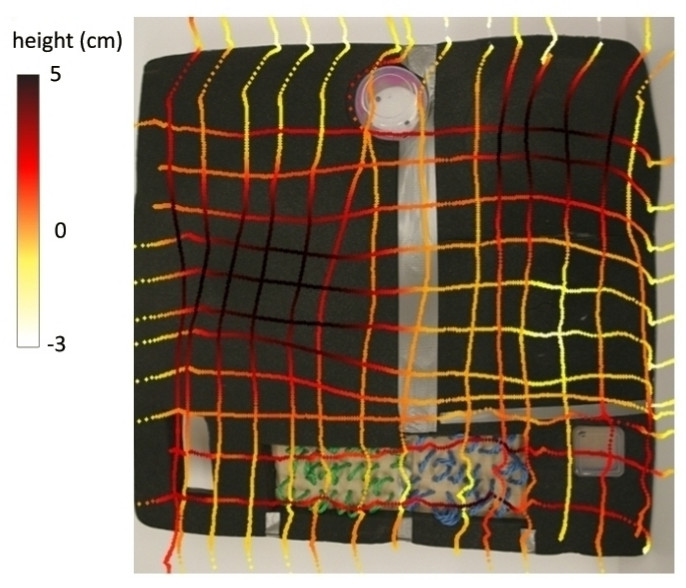 | This article presents a versatile controller that enables various contact tooling tasks with minimal prior knowledge of the tooled surface. The controller is derived from results of neuroscience studies that investigated the neural mechanisms utilized by humans to control and learn complex interactions with the environment. We demonstrate here the versatility of this controller in simulations of cutting, drilling and surface exploration tasks, which would normally require different control paradigms. We also present results on the exploration of an unknown surface with a 7-DOF manipulator, where the robot builds a 3D surface map of the surface profile and texture while applying constant force during motion. Our controller provides a unified control framework encompassing behaviors expected from the different specialized control paradigms like position control, force control and impedance control. |
2011
Changing human upper-limb synergies with an exoskeleton using viscous fields
Abstract | ||
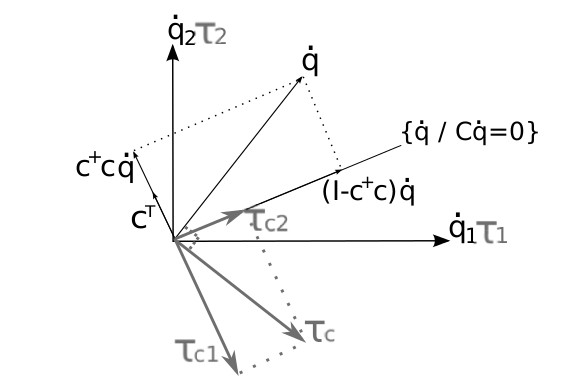 | Robotic exoskeletons can apply forces distributed on the limbs of the subject they are connected to. This offers a great potential in the field of neurorehabilitation, to address the impairment of interjoint coordination in hemiparetic stroke patients. In these patients, the normal flexible joint rotation synergies are replaced by pathological fixed patterns of rotation. In this paper, we investigate how the concept of synergy can be exploited in the control of an upper limb exoskeleton. The long term goal is to develop a device capable of changing the joint synchronization of a patient performing exercises during rehabilitation. The paper presents a controller able of generating joint viscous torques in such a way that constraints on joint velocities can be imposed to the subject without constraining the hand motion. On another hand, the same formalism is used to describe synergies observed on the arm joint motion of subjects realizing pointing tasks. This approach is experimented on a 4 Degrees Of Freedom (DoF) upper arm exoskeleton with subjects performing pointing 3-dimensional tasks. Results exhibit the basic properties of the controller and show its capacity to impose an arbitrary chosen synergy without affecting the hand motion. |
2010
On the kinematic design of exoskeletons and their fixations with a human member
AbstractA crucial problem in developing robotic exoskeletons lies in the design of physical connexions between the device and the human limb it is connected to. Indeed, because in general the human limb kinematics and the exoskeleton kinematics differ, using an embedment at each connection point leads to hyperstaticity. Therefore, uncontrollable forces can appear at the interaction port. To cope with this problem, literature suggests to add passive mechanisms at the fixation points. However, empirical solutions proposed so far suffer from a lack of proper analysis and generality. In this paper, the general problem of connecting two similar kinematic chains through multiple passive mechanisms is studied. A constructive method that allows to determine all the possible repartitions of freed DoFs across the different fixation mechanisms is derived. It includes formal proofs of global isostaticity. Practical usefulness is illustrated through an example with conclusive experimental results. |
Formal Methodology for Avoiding Hyperstaticity When Connecting an Exoskeleton to a Human Member
Abstract | ||
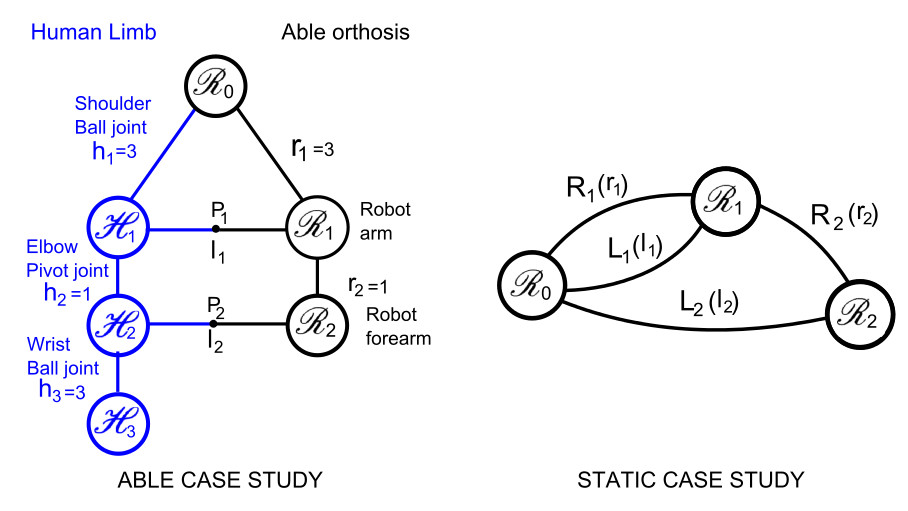 | The design of a robotic exoskeleton often focuses on replicating the kinematics of the human limb that it is connected to. However, human joint kinematics is so complex that in practice, the kinematics of artificial exoskeletons fails to reproduce it exactly. This discrepancy results in hyperstaticity. Namely, uncontrolled interaction forces appear. |
2009
A Methodology to Design Kinematics of Fixations between an Orthosis and a Human Member
Abstract | ||
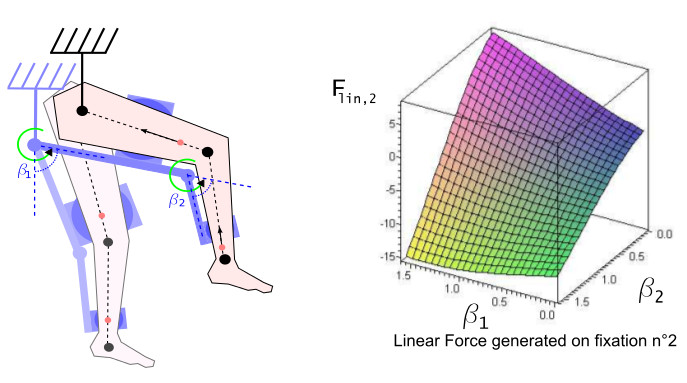 | The design of robotic orthoses focuses strongly on replicating kinematics of human limb. However, often sophisticated mechanisms which attempt at reproducing complex kinematics of human joints fails in adapting to geometrical variations of subjects sizes and eccentricities. One major that arises from this mismatching is an occurrence of hyperstaticity induced by the uncontrolled interaction forces. In this paper, we take the point of view of statics to investigate the force transmission problem, which is required for a fine force control. The main result of this study focuses on designing fixations between the orthosis and the human limb that provide additional degrees of freedom. The method involves two steps. Firstly, a set of possible solutions with respect to the isostaticity criterion is derived. Then, among these possible solutions, a set of design rules considering physiological aspects of transmitting forces to human limbs is used to select a preferred configuration. As an example, the method is applied to an existing 4 active DOF arm orthosis. |
Experimental Evaluation of Several Strategies for Human Motion Based Transparency Control
AbstractHuman interactive robots continue to improve human quality of life with their diverse applications. Their field includes, but is not limited to, haptic devices, force feedback tele-manipulation, surgical co-manipulation, medical rehabilitation, and various multi-degree of freedom robotic devices where the human operator and robot are often required to simultaneously execute tasks and collaborate with a specific share of forces/energy. More than tuning mechanical design, the robot control enhancement with a force sensor, is the key for increasing transparency (i.e the capacity for a robot to follow human movements without any human-perceptible resistive forces). With an ideal robot control, the interaction between robot and human would be extremely natural and fluid that the comanipulation of tasks would seem to be achieved with a transparent aid from the robot. For such, the classical force feedback control in certain cases still seems insufficient as is often limited by various factors (noise, bandwidth limitation, stability, sensor cost..etc). Our experiments are focused on evaluating the performance increase in terms of transparency of controller by using human motion predictions. We evaluate several ways to use predictive informations in the control to overcome present transparency limitations during a simple comanipulation pointing task. |
2008
How can human motion prediction increase transparency?
Abstract | ||
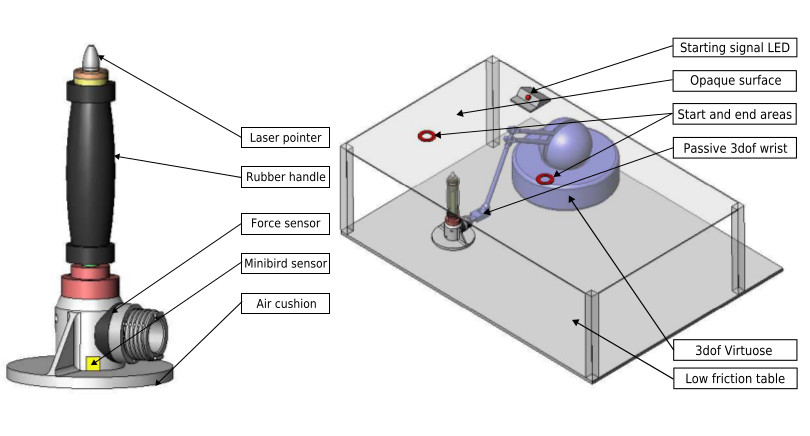 | A major issue in the field of human-robot interaction for assistance to manipulation is transparency. This basic feature qualifies the capacity for a robot to follow human movements without any human-perceptible resistive forces. In this paper we address the issue of human motion prediction in order to increase the transparency of a robotic manipulator. Our aim is not to predict the motion itself, but to study how this prediction can be used to improve the robot transparency. For this purpose, we have designed a setup for performing basic planar manipulation tasks involving movements that are demanded to the subject and thus easily predictable. Moreover, we have developed a general controller which takes a predicted trajectory (recorded from offline free motion experiments) as an input and feeds the robot motors with a weighted sum of three controllers: torque feedforward, variable stiffness control and force feedback control. Subjects were then asked to perform the same task but with or without the robot assistance (which was not visible to the subject), and with several sets of gains for the controller tuning. First results seems to indicate that when a predictive controller with open loop torque feedforward is used, in conjunction with force- feedback control, the interaction forces are minimized. Therefore, the transparency is increased. |
Design and acceptability assessment of a new reversible orthosis
Abstract | ||
 | We present a new device aimed at being used for upper limb rehabilitation. Our main focus was to design a robot capable of working in both the passive mode (i.e. the robot shall be strong enough to generate human-like movements while guiding the weak arm of a patient) and the active mode (i.e. the robot shall be able of following the arm without disturbing human natural motion). This greatly challenges the design, since the system shall be reversible and lightweight while providing human compatible strength, workspace and speed. The solution takes the form of an orthotic structure, which allows control of human arm redundancy contrarily to clinically available upper limb rehabilitation robots. It is equipped with an innovative transmission technology, which provides both high gear ratio and fine reversibility. In order to evaluate the device and its therapeutic efficacy, we compared several series of pointing movements in healthy subjects wearing and not wearing the orthotic device. In this way, we could assess any disturbing effect on normal movements. Results show that the main movement characteristics (direction, duration, bell shape profile) are preserved. |
2007
Innovative concept of unfoldable wheel with an active contact adaptation mechanism
AbstractIn this paper, an original expandable mechanism for unfolding wheels is proposed. This mechanism combines two elementary mechanisms. One allows the deployment of the rim while the other one ensures the contact shape adaptation. In the first section, we analyse the different deployment mechanisms already proposed in the literature. Then, the design of the rim expansion mechanism is described and two complementary versions are proposed. Last, based on terramechanics models, a contact surface adaptation mechanism is proposed. This system allows to adapt the wheel-ground interaction properties and make the wheel ables to improve its traction and steering performance on soft soil. |
2006
Design of an innovative unfoldable wheel with contact surface adaptation mechanism for planetary rovers
AbstractIn this paper, an original expandable mechanism for unfolding wheels is proposed. This mechanism combines two elementary mechanisms. One allows the deployment of the rim while the other one ensuring the contact shape adaptation. In a first section, we analyse the different deployment mechanisms already proposed in the literature. Then, the design of the rim expansion mechanism is described and two complementary version are proposed. Last, based on terramechanics model, a contact surface adaptation mechanism is proposed. This system allows to adapt the wheel-ground interaction properties and make the wheel ables to improve its traction and steering performance on soft soil. |
Thesis/HDR
2022
On the use of sensorimotor coordinations for intuitive and ecological robotic assistance to gesture
2010
Contributions à l'exploitation d'exosquelettes actifs pour la rééducation neuromotrice
Vulgarization articles
2017
Interfaces interactives et vie quotidienne.
The Myth of Human Enhancement
Robotic prostheses: what do they actually mean for the patient?
Abstract | ||
| Prostheses have undergone an accelerated development over the past few years, triggered by, amongst others, the conflicts in Iraq and Afghanistan. Indeed, with their share of wounded and amputees, these conflicts will undoubtedly have made a strong contribution to, putting the spotlight on this niche field of research. The technological sophistication of robotic prostheses gives free rein to the imagination. But what is the reality on the ground? As we speak more and more of the augmented man and body-machine fusion, what does this all actually mean for the patient? To shed some light on this matter, we put our questions to Nathanaël Jarrassé, a CNRS researcher at the Institute of Intelligent Systems and Robotics at the Pierre and Marie Curie University in Paris. |
2014
Abstract | ||
 | Face à certains transhumanistes qui prônent le dépassement de notre condition biologique, nous devons revenir aux réalités des personnes appareillées qui ne sont pas des hommes machines. |